浙江大学硕士学位论文2007 第2章非线性有限元理论 第2章非线性有限元基本理论 非线性问题可以分为几何非线性、物理(材料)非线性和状态非线性。几何非线性义分为应力 刚化(Stress stiffening)、大应变(Large strain)、大旋转(Large rotation)和旋转软化(Spin softening)。 几何非线性问题中单元刚度为单元节点位移的函数,即考虑了结构变形对结构刚度的影响。 本文在第三章中,将利用通用工程软件NSYS,计算分析蜻蜓翅膀在各种受力状态下的内力与位 移。由于蜻蜓翅膀在外力作用下常产生较大的变形,所以有限元分析中必须得考虑结构变形对 结构刚度的影响,即几何非线性问题。 在几何非线性问题当中,通常采用增量分析方法。它用两种不同的表达格式。第一种格式中 所有静力学和运动学变量总是参考初始位形,即整个分析过程中参考位形保持不变,这种格式 称为完全的Lagrange格式(T.L):另一种格式中所有静力学和运动学的变量参考于每一载荷或 时间步长开始的位形,即在分析过程中参考位形不断被更新,这种格式称为更新的Lagrange格 式(UL)。在通用的有限元分析程序中,通常同时包括这两种格式,使用时可以根据所分析问题 及材料本构关系的具体特点和形式选择最有效的格式)。 在三、四章分析中,均用到了ANSYS中的三节点梁元beaml89单元和8节点等参曲壳单元 shells3,下面简单介绍两种单元的非线性有限元基本理论。 2.1beam189梁元基本理论 2.11beam189单元特点 beam1889单元是基于Timoshenko梁理论,它有如下特点: (1)单元形函数为拉格朗日插值多项式,具有线性或二次的位移函数。 (2)考虑横截面一阶剪切变形。即假定变形前垂直于梁中心线的平截面,在梁受载荷而弯曲变 形时仍然保持为平面,但不再垂直梁中心线。 (3)可用于分析线性、大转动和大应变的非线性问题;支持弹性、粘弹、粘塑、壩变和塑性模 型,横截面允许定义复合材料。 (④)有多种截面形式可拱选择,并支持自定义截面。 (5)beam189为三节点梁元。 -13-
浙江大学硕士学位论文2007 第2章非线性有限元理论 第2章非线性有限元基本理论 非线性问题可以分为几何非线性、物理(材料)非线性和状态非线性.几何非线性又分为应力 刚化(Stress stiffening)、大应变(Large strain)、大旋转(Large rotation)和旋转软化(Spin softening). 几何非线性问题中单元刚度为单元节点位移的函数,即考虑了结构变形对结构冈Ⅱ度的影响. 本文在第三章中,将利用通用工程软件ANSYS,计算分析蜻蜒翅膀在各种受力状态下的内力与位 移.由于蜻蜒翅膀在外力作用下常产生较大的变形,所以有限元分析中必须得考虑结构变形对 结构刚度的影响,即几何非线性问题。 在几何非线性问题当中,通常采用增量分析方法。它用两种不同的表达格式.第一种格式中 所有静力学和运动学变量总是参考初始位形,即整个分析过程中参考位形保持不变,这种格式 称为完全的Lagrange格式(T.L):另一种格式中所有静力学和运动学的变量参考于每一载荷或 时间步长开始的位形,即在分析过程中参考位形不断被更新,这种格式称为更新的Lagral坞e格 式(u”.在通用的有限元分析程序中,通常同时包括这两种格式,使用时可以根据所分析问题 及材料本构关系的具体特点和形式选择最有效的格式p”. 在三、四章分析中,均用到了ANSYS中的三节点粱元;beamlS9单元和8节点等参曲壳单元 shell93,下面简单介绍两种单元的非线性有限元基本理论。 2.1 beaml89梁元基本理论 2.1.1 beaml89单元特点 beaml89单元是基于Timoshenko梁理论,它有如下特点跚: (1)单元形函数为拉格朗日插值多项式,具有线性或二次的位移函数。 (2)考虑横截面一阶剪切变形。即假定变形前垂直于粱中心线的平截面,在梁受载荷而弯曲变 形时仍然保持为平面,但不再垂直梁中心线. (3)可用于分析线性、大转动和大应变的非线性问题;支持弹性、粘弹、粘塑、蠕变和塑性模 型。横截面允许定义复合材料。 (4)有多种截面形式可拱选择,并支持自定义截面。 (5)beaml89为三节点梁元。 一13一
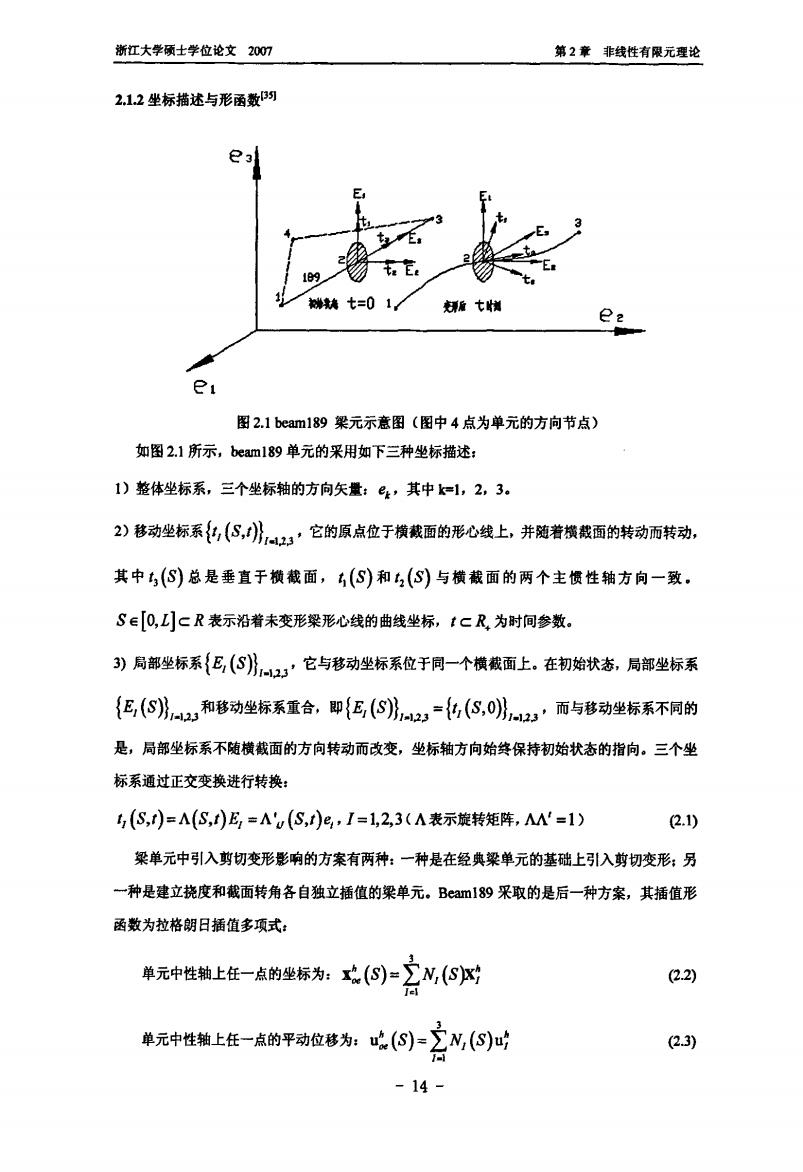
浙江大学质士学位论文2007 第2章非线性有限元理论 2,1.2坐标描述与形函数阿 精七=0 图2.1bcam189梁元示意图(图中4点为单元的方向节点) 如图2.1所示,beaml89单元的采用如下三种坐标描述: 1)整体坐标系,三个坐标轴的方向矢量:已:,其中k=1,2,3。 2)移动坐标系名,(S,}23它的原点位于横截面的形心线上,并随着横截面的转动而转动, 其中(S)总是垂直于横截面,(S)和,(S)与横截面的两个主惯性轴方向一致。 S∈[0,)]cR表示沿着未变形粱形心线的曲线坐标,tcR为时间参数。 3)局部坐标系{E,(S》25,它与移动坐标系位于同一个横截面上。在初始状态,局部坐标系 {E,(S%2和移动坐标系重合,即{E,(S以22=,(S,0以23而与移动坐标系不同的 是,局部坐标系不随横截面的方向转动而改变,坐标轴方向始终保持初始状态的指向。三个坐 标系通过正交变换进行转换: 4,(S,t)=A(S,)E,=A'yS,t)e,I=1,2,3(A表示旋转矩阵,M'=1) 2.1) 粱单元中引入剪切变形影响的方案有两种:一种是在经典梁单元的基础上引入剪切变形:另 一种是建立挠度和截面转角各自独立插值的梁单元。Baml89采取的是后一种方案,其插值形 函数为拉格朗日插值多项式: 单元中性轴上任一点的坐标为: (倒-2,sg (2.2) 单元中性轴上任一点的平动位移为:、 (S)-2N,(S)u时 (2.3) -14-
浙江大学硕士学位论文2007 第2章非线性有限元理论 2.1.2坐标描述与形函数p∞ Pt 图2.1 beaml89粱元示意图(图中4点为单元的方向节点) 如图2.1所示,beaml89单元的采用如下三种坐标描述: 1)整体坐标系,三个坐标轴的方向矢量:ek,其中k=-I,2,3· 2)移动坐标系◇(s,f)},Ilj,,它的原点位于横截面的形心线上,并随着横截面的转动而转动, 其中如(s)总是垂直于横截面,^(S)和f2(s)与横截面的两个主惯性轴方向一致。 s∈【o,三】cR表示沿着未变形梁形心线的曲线坐标,rc足为时间参数。 3)局部坐标系{易p)}fIljj,它与移动坐标系位于同一个横截面上。在初始状态,局部坐标系 {局(s))。j)和移动坐标系重合,即{弓(s)),。。≯={‘(s,o)),。筇,而与移动坐标系不同的 是,局部坐标系不随横截面的方向转动而改变,坐标轴方向始终保持初始状态的指向。三个坐 标系通过正交变换进行转换: ‘(s,r)=A(最f)尾=A0(最,)弓,I=1,2,3(A表示旋转矩阵,从‘=1) (2.1) 粱单元中引入剪切变形影响的方案有两种:一种是在经典梁单元的基础上引入剪切变形;另 一种是建立挠度和截面转角各自独立插值的梁单元.Beaml89采取的是后一种方案,其插值形 函数为拉格朗日插值多项式: 3 单元中性轴上任一点的坐标为:xh。(s)=∑M(s)x: (2.2) JcI 3 单元中性轴上任一点的平动位移为:uh。p)=∑M(s)u? (2.3) 1-1 一】4一
新江大学硕士学位论文2007 第2章非线性有限元理论 单元中性轴上任一点的转角位移为: gS)-2N,S)9 (2.4) 其中形函数:N=-3+32N2=3+2N=1-2,X是单元节点坐标矢量,u是单 元节点平动位移矢量,是单元节点转动位移矢量,=1,2,3. 213应力与应变度量 Green应变张量: y=AS1-B (2.5) as Green应变张量是用变形前坐标表示, 它是局部坐标{E,(S}2,的函数. {o=[D]{r} (2.6) ar a 弹性矩阵为: D(S,r,K)= arar Orax Y为应变能函数 (2.7) ay r LOT8K KK 对于三维线弹性单元有: D=diag GAGA EA EI El GJ (2.8) 21.4单元切线刚度矩阵的建立及变量的更新 单元势能函数可以按下式计算: n(o,)色∫平(C,x)s-∫n4aS (2.9) [oL] 其中:Π(o,)是势能函数:平(工,K)是应变能函数,它由下式给出: rw-r,x]DG4.6%,4队.B队,a (2.10) 对上式进行线性化,并应用虚位移原理得: [G(,)]=[{()+T(}△其+P2(]=0 2.11) 其中:S()是单元线性刚度矩阵, T(可)是单元几何刚度矩阵。 -15-
撕江大学硕士学位论文2007 第2章非线性有限元理论 单元中性轴上任一点的转角位移为:观p)=∑M(s)钟 (2.4) 其中形函数:ⅣI=一J+s2Ⅳ2=s+s2Ⅳ,=l—s2,x:是单元节点坐标矢量,u?是单 ,,:At垫盟!一E (2.5) ’ aS 。 on∞n应变张量是用变形前坐标表示,它是局部坐标{历(s)}1-1,2,3的函数· {盯}=【D】∽ (2·6’ …轨郇,r,巾睡DFoT剽…蜘数 眩" 弹性矩阵为:郇,耻)sl卯 繁l甲为应变能函数 (2.7> Larar a囝茁J D=纰【鳓%K4目%凹】 (2·8’ Ⅱ(巧,矿)皇J甲(r'rp一卜哦舔 (2舯 Io习 【o捌 其中:17(o口,力是势能函数;w(r,置)是应变能函数,它由下式给出: ll,(r’茁)=三[rf,∥]。豫【叫,G如,剧,目,马,甜】仨} c:Jo, 工[谚(妒,矿)]皇矿.[{霹(≯)+零(≯)}△秽+霉(芗)]=o (2-11) 其中: 霹(≯)是单元线性刚度矩阵, 霉(歹)是单元几何刚度矩阵·

浙江大学硕士学位论文2007 第2章非线性有限元理论 {()+工()}是可构形时单元的切线刚度矩阵。 s成同x心x西 2.12) 1 0 中:-[6y1 (2.13) [×刘台p朗 0 (2.14) Lo2 0 T-x时x西 -eswr3gw小 0 -[x]N,M, 2.15 0) N1 NI (2.16 采用增量法求解时变量的更新算法: 克n1(S)=克((S)+4(S) 2.1万 A(S)=exp[(S)]A,(S) (2.18) 其中:中(S)是上一时刻的线位移,(S)是位移增量。 A,(S)是上一时刻的旋转矩阵,xp[⊙(S)]由转角增量构成的增量旋转矩阵。 -16-
浙扛大学硬士学位论文2007 第2章非线性有限元理论 {醴(芗)+露(方))是声构形时单元的切线刚度矩阵. 路;f霉×e×茸西 靴霹_[-耀×]Z,] 『0 ■0妒k 1 【虬×】皇l妒k 0■|01 l 【一矿’佗妒.o。0 J 吃=f甲:×矽×甲:帮 如。≥啪q川以二罱端吲川删卜 2丑[矿。]Ⅳ,M{一[舻×]川以+}矿美:;。以)。]Ⅳ,M}P (2.12) (2.13) (2.14) (2.15) 其中;钟=[乞1 Z,Z。] 。.z◇ 采用增量法求解时变量的更新算法: 如州($=丸(s)+%(s) (2.17) A。。(s)=exp[o(s)]A。(s) (2.is) 其中:丸(s)是上一时刻的线位移,uo(s)是位移mm。 A。(s)是上一时刻的旋转矩阵,c)【p[@(s)]由转角增量构成的增量旋转矩阵。 一16一

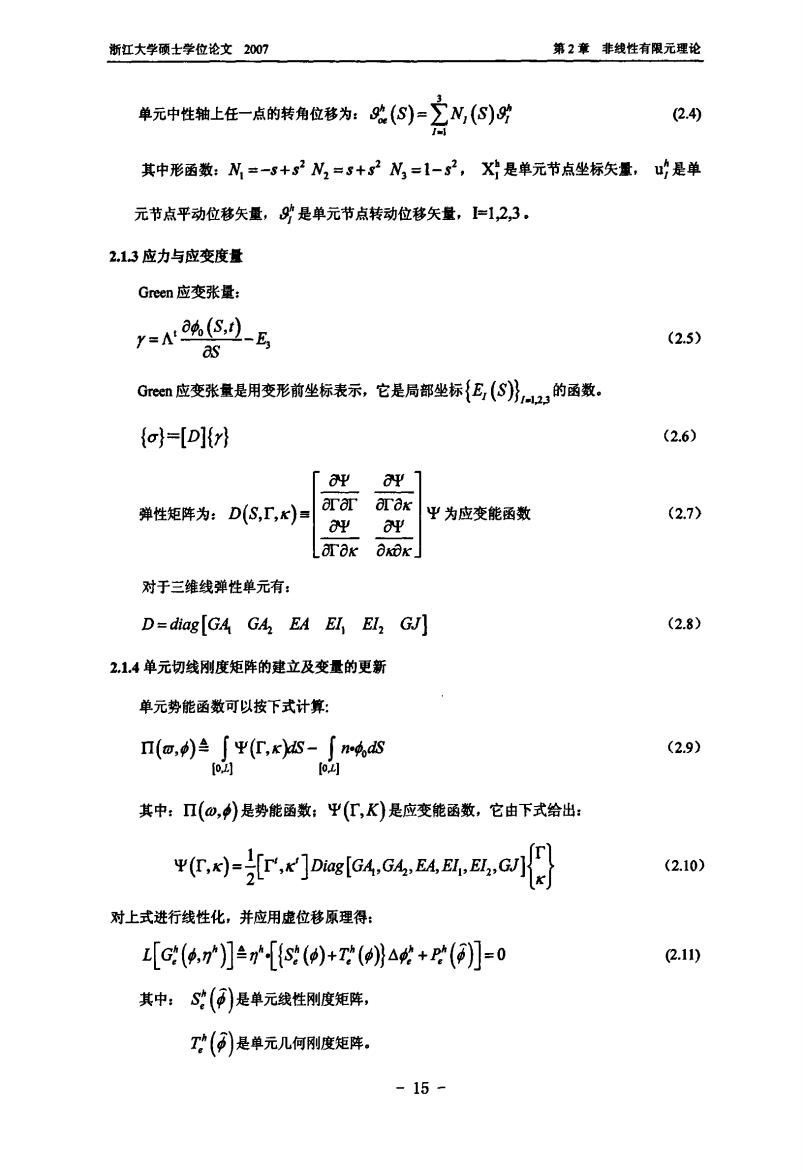
浙江大学项士学位论文2007 第2章非线性有限元理论 2.2 Shell93基本理论B Triangular Option 图2.2八节点等参曲壳元 2,21hel93单元特点 如图2.2所示,Shll93单元为八节点等参曲壳单元,能用来分析塑性、应力硬化、大变形、 大应变等。 2.22坐标描述与形函数 shell93单元采取三种坐标系: 整体坐标系:XYZ,局部坐标系:y:任一一点的坐标系y,乙 x2的坐标轴方向表述:轴取坐标原点处与z同侧的外法线方向:x山轴取单位 矢量e,×e,的方向:yu轴取单位矢量e,×e,的方向。 壳体单元中任一点位移: (2.19) 它由两部分组成:前部分为节点移动引起的位移:另一部分为该点法线转动引起的位移: 0 0 w8& (=1,2,…,8)称为形函数矩阵: M=-5-刃-W+N):及=+50-小-2,+N。): N=+5+列-(+):N=-+)-,+): -17-
浙江大学硕士学位论文2007 第2章非线性有限元理论 2.2 SheU93基本理论p61 KLO Triangular opa∞ {蛩=喜cⅣ,,仨}+套c孵,等{耋笔H:} 旺∽ FN,0 01 [M9]=l o川 o l (f=1,2,…,8)称为形函数矩阵; 【0 0 Mj Ⅳl={(1一孝)(1一,7)一≯I N。,+虮);Ⅳ2={(1+f)(1一刁)一圭(Ⅳ5+Ⅳ6); Ⅳ3=丢(1+善)(1+刁)一≯I,V。+Ⅳ7);Ⅳ4=丢(1一掌)(1+,7)一≯1 AZ,+Ⅳ3); 一17一