
哈尔滨工业大学工程硕士学位论文 图1-10西北工业大学自2001年所研制的部分微型扑翼样机实物图 中国航空样物馆 1109/0 图1-112011年西北工业大学研制的获得了中航工业杯-国际无人飞行器创新大奖赛中优秀创 意奖的仿生扑翼“信鸽” 北京航空航天大学的机器人研究所同样也一直在致力于微型仿生扑翼飞行器 的研究5],其对于仿生扑翼机构、柔性翼、气动力学的数值计算以及实验分析上 都发表了一定数量的文章,取得了一定的成果。在2015年1月的EEE第28届国 际微机电系统会议上,该校还介绍了其与加州大学伯克利分校共同研制的微扑翼 静电驱动器,该驱动器的成功研制也是北航在微型扑翼飞行器的研究上向MEMS 化的又一大进展54 图1-12北航所研制的扑翼机以及在2015年初发布的微扑翼静电驱动器的原理图和实物图 -8-
哈尔滨工业大学工程硕士学位论文 - 8 - 图 1-10 西北工业大学自 2001 年所研制的部分微型扑翼样机实物图 图 1-11 2011 年西北工业大学研制的获得了中航工业杯-国际无人飞行器创新大奖赛中优秀创 意奖的仿生扑翼“信鸽” 北京航空航天大学的机器人研究所同样也一直在致力于微型仿生扑翼飞行器 的研究[53],其对于仿生扑翼机构、柔性翼、气动力学的数值计算以及实验分析上 都发表了一定数量的文章,取得了一定的成果。在 2015 年 1 月的 IEEE 第 28 届国 际微机电系统会议上,该校还介绍了其与加州大学伯克利分校共同研制的微扑翼 静电驱动器,该驱动器的成功研制也是北航在微型扑翼飞行器的研究上向 MEMS 化的又一大进展[54]。 图 1-12 北航所研制的扑翼机以及在 2015 年初发布的微扑翼静电驱动器的原理图和实物图
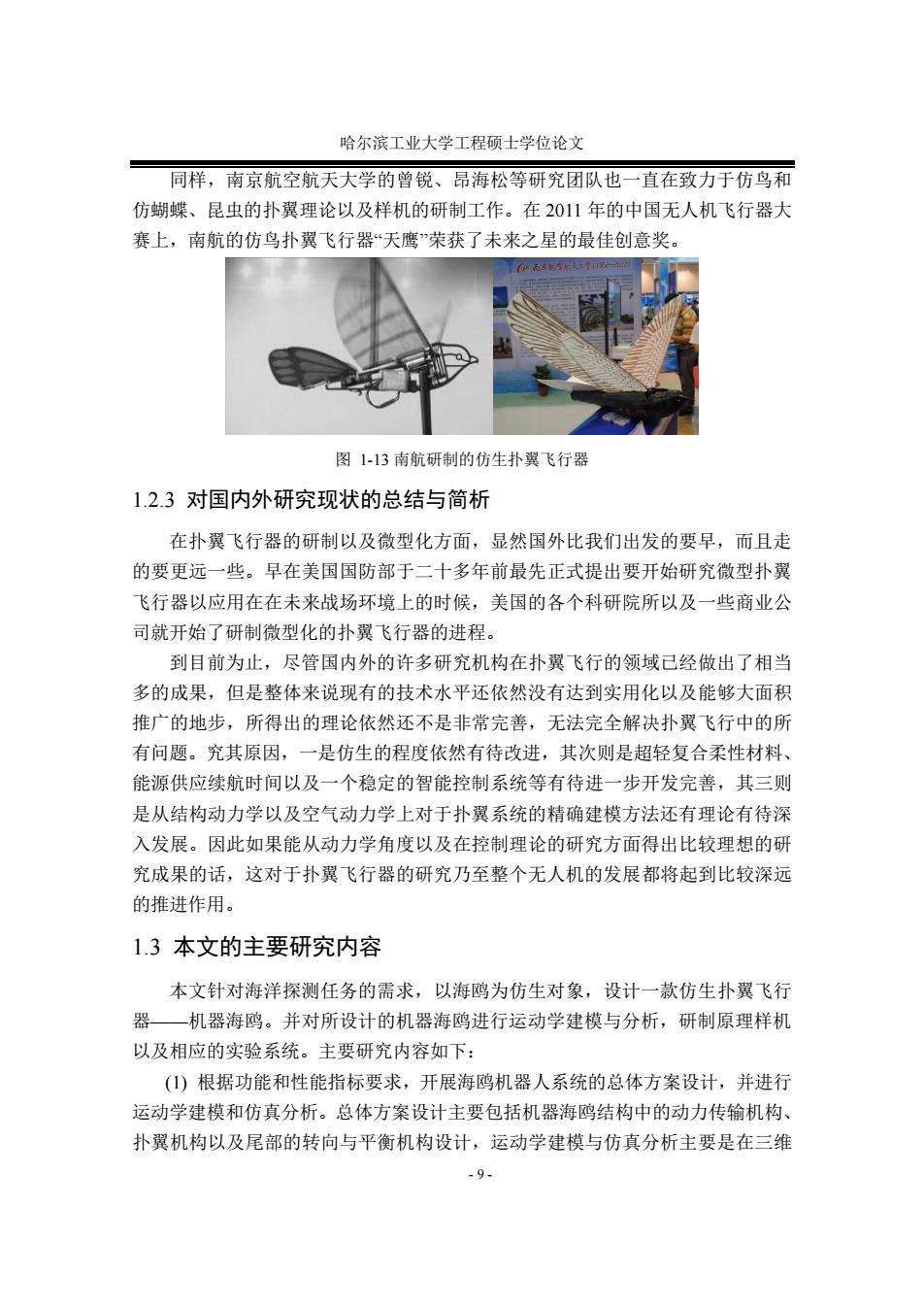
哈尔滨工业大学工程硕士学位论文 同样,南京航空航天大学的曾锐、昂海松等研究团队也一直在致力于仿鸟和 仿蝴蝶、昆虫的扑翼理论以及样机的研制工作。在2011年的中国无人机飞行器大 赛上,南航的仿鸟扑翼飞行器“天鹰”荣获了未来之星的最佳创意奖。 图1-13南航研制的仿生扑翼飞行器 1.2.3对国内外研究现状的总结与简析 在扑翼飞行器的研制以及微型化方面,显然国外比我们出发的要早,而且走 的要更远一些。早在美国国防部于二十多年前最先正式提出要开始研究微型扑翼 飞行器以应用在在未来战场环境上的时候,美国的各个科研院所以及一些商业公 司就开始了研制微型化的扑翼飞行器的进程。 到目前为止,尽管国内外的许多研究机构在扑翼飞行的领域已经做出了相当 多的成果,但是整体来说现有的技术水平还依然没有达到实用化以及能够大面积 推广的地步,所得出的理论依然还不是非常完善,无法完全解决扑翼飞行中的所 有问题。究其原因,一是仿生的程度依然有待改进,其次则是超轻复合柔性材料、 能源供应续航时间以及一个稳定的智能控制系统等有待进一步开发完善,其三则 是从结构动力学以及空气动力学上对于扑翼系统的精确建模方法还有理论有待深 入发展。因此如果能从动力学角度以及在控制理论的研究方面得出比较理想的研 究成果的话,这对于扑翼飞行器的研究乃至整个无人机的发展都将起到比较深远 的推进作用。 1.3本文的主要研究内容 本文针对海洋探测任务的需求,以海鸥为仿生对象,设计一款仿生扑翼飞行 器一机器海鸥。并对所设计的机器海鸥进行运动学建模与分析,研制原理样机 以及相应的实验系统。主要研究内容如下: (1)根据功能和性能指标要求,开展海鸥机器人系统的总体方案设计,并进行 运动学建模和仿真分析。总体方案设计主要包括机器海鸥结构中的动力传输机构、 扑翼机构以及尾部的转向与平衡机构设计,运动学建模与仿真分析主要是在三维 -9
哈尔滨工业大学工程硕士学位论文 - 9 - 同样,南京航空航天大学的曾锐、昂海松等研究团队也一直在致力于仿鸟和 仿蝴蝶、昆虫的扑翼理论以及样机的研制工作。在 2011 年的中国无人机飞行器大 赛上,南航的仿鸟扑翼飞行器“天鹰”荣获了未来之星的最佳创意奖。 图 1-13 南航研制的仿生扑翼飞行器 1.2.3 对国内外研究现状的总结与简析 在扑翼飞行器的研制以及微型化方面,显然国外比我们出发的要早,而且走 的要更远一些。早在美国国防部于二十多年前最先正式提出要开始研究微型扑翼 飞行器以应用在在未来战场环境上的时候,美国的各个科研院所以及一些商业公 司就开始了研制微型化的扑翼飞行器的进程。 到目前为止,尽管国内外的许多研究机构在扑翼飞行的领域已经做出了相当 多的成果,但是整体来说现有的技术水平还依然没有达到实用化以及能够大面积 推广的地步,所得出的理论依然还不是非常完善,无法完全解决扑翼飞行中的所 有问题。究其原因,一是仿生的程度依然有待改进,其次则是超轻复合柔性材料、 能源供应续航时间以及一个稳定的智能控制系统等有待进一步开发完善,其三则 是从结构动力学以及空气动力学上对于扑翼系统的精确建模方法还有理论有待深 入发展。因此如果能从动力学角度以及在控制理论的研究方面得出比较理想的研 究成果的话,这对于扑翼飞行器的研究乃至整个无人机的发展都将起到比较深远 的推进作用。 1.3 本文的主要研究内容 本文针对海洋探测任务的需求,以海鸥为仿生对象,设计一款仿生扑翼飞行 器——机器海鸥。并对所设计的机器海鸥进行运动学建模与分析,研制原理样机 以及相应的实验系统。主要研究内容如下: (1) 根据功能和性能指标要求,开展海鸥机器人系统的总体方案设计,并进行 运动学建模和仿真分析。总体方案设计主要包括机器海鸥结构中的动力传输机构、 扑翼机构以及尾部的转向与平衡机构设计,运动学建模与仿真分析主要是在三维

哈尔滨工业大学工程硕士学位论文 设计软件Solidworks中建立好其完整的三维结构模型后使用其自带的motion分析 插件对部分结构设计的合理性进行校核与验证: (2)推导海鸥机器人的运动学计算公式并进行数值分析。使用矢量方程法和图 解法得到扑动机构的运动学计算公式,并使用matlab得到该机构在确定好各杆长 尺寸以后的运动学图形直观显示效果,与使用SolidWorks的motion分析结果进行 对比以验证设计的合理性: (3)根据设计与计算的结果进行器件选型,研制海鸥机器人的原理样机。在结 构设计完成以后,确定各个零部件的加工工艺以并且选定材料,加工出所有的零 部件后经过装配得到所研制的样机: (4)研制专门用于评价机器海鸥性能的实验系统,并开展实验研究。实验系统 用于验证关键机构设计的合理性与有效性,并测试海鸥样机在不同扑动参数下的 飞行性能。 -10-
哈尔滨工业大学工程硕士学位论文 - 10 - 设计软件 Solidworks 中建立好其完整的三维结构模型后使用其自带的 motion 分析 插件对部分结构设计的合理性进行校核与验证; (2) 推导海鸥机器人的运动学计算公式并进行数值分析。使用矢量方程法和图 解法得到扑动机构的运动学计算公式,并使用 matlab 得到该机构在确定好各杆长 尺寸以后的运动学图形直观显示效果,与使用 SolidWorks 的 motion 分析结果进行 对比以验证设计的合理性; (3) 根据设计与计算的结果进行器件选型,研制海鸥机器人的原理样机。在结 构设计完成以后,确定各个零部件的加工工艺以并且选定材料,加工出所有的零 部件后经过装配得到所研制的样机; (4) 研制专门用于评价机器海鸥性能的实验系统,并开展实验研究。实验系统 用于验证关键机构设计的合理性与有效性,并测试海鸥样机在不同扑动参数下的 飞行性能
哈尔滨工业大学工程硕士学位论文 第2章 机器海鸥的作业环境与需求分析 2.1引言 机器海鸥由于其特殊的结构和飞行方式,以及需要工作在恶劣的海洋环境中, 因此我们有必要预先对其工作环境进行一定的阐述和分析。并在此基础上指定所 要设计的机器海鸥应该要达到的性能指标和各项参数要求,以及提出对于能够实 现预期功能的一些关键机构的要求。 2.2机器海鸥的作业环境分析 由于海水的比热容大,在受到太阳辐射后、再加上大气环流和海水洋流的作 用,会使得海水的温度与海面附近空气的温度通常会具有比较大的差别。这种差 别会使得海面附近气流的变化会异常猛烈,这也是海面上的风浪一般比较大的原 因。 用于巡航监测用的机器海鸥在工作时,需要在风速条件波动变化很大的海洋 上空飞行,这些恶劣的条件一方面对于仿生机器海鸥机体结构的强度提出了比较 高的要求,同时还对于其抵抗气流干扰和维持自身平衡与稳定状态的能力提出了 挑战。 2.3需求分析 2.3.1作业内容 当机器海鸥飞行在平稳的气流中时,要能满足基本的飞行性能一直飞、爬 升、俯冲、转弯、疾飞、慢速飞行以及滑翔。 当其处于比较紊乱的气流中时,机器海鸥在进行巡航作业时所面对的环境非 常复杂,此时则要求除了能够满足基本的飞行功能以外,还要能够具有一定的抵 抗外界干扰的能力。也就是说,机身所带的控制系统还要求具有一定的稳定性和 鲁棒性以保证飞行器飞行时的姿态合理和各种运动参数的正确性。 机器海鸥基本的飞行功能是依靠其传动与扑动机构和机电系统来实现的。低 层次的抵抗外力干扰的能力一方面是依靠双翼在扑动时的对称性来保证,另一方 面还需要依靠尾翼的调节作用。高层次的抵抗干扰的能力则需要依靠机器海鸥自 身携带的多种传感器一加速度传感器、陀螺仪以及位置传感器等,在对运动信 息进行解算以后将数据反馈到执行元件来实时调节机器海鸥的姿态。 -11-
哈尔滨工业大学工程硕士学位论文 - 11 - 第2章 机器海鸥的作业环境与需求分析 2.1 引言 机器海鸥由于其特殊的结构和飞行方式,以及需要工作在恶劣的海洋环境中, 因此我们有必要预先对其工作环境进行一定的阐述和分析。并在此基础上指定所 要设计的机器海鸥应该要达到的性能指标和各项参数要求,以及提出对于能够实 现预期功能的一些关键机构的要求。 2.2 机器海鸥的作业环境分析 由于海水的比热容大,在受到太阳辐射后、再加上大气环流和海水洋流的作 用,会使得海水的温度与海面附近空气的温度通常会具有比较大的差别。这种差 别会使得海面附近气流的变化会异常猛烈,这也是海面上的风浪一般比较大的原 因。 用于巡航监测用的机器海鸥在工作时,需要在风速条件波动变化很大的海洋 上空飞行,这些恶劣的条件一方面对于仿生机器海鸥机体结构的强度提出了比较 高的要求,同时还对于其抵抗气流干扰和维持自身平衡与稳定状态的能力提出了 挑战。 2.3 需求分析 2.3.1 作业内容 当机器海鸥飞行在平稳的气流中时,要能满足基本的飞行性能——直飞、爬 升、俯冲、转弯、疾飞、慢速飞行以及滑翔。 当其处于比较紊乱的气流中时,机器海鸥在进行巡航作业时所面对的环境非 常复杂,此时则要求除了能够满足基本的飞行功能以外,还要能够具有一定的抵 抗外界干扰的能力。也就是说,机身所带的控制系统还要求具有一定的稳定性和 鲁棒性以保证飞行器飞行时的姿态合理和各种运动参数的正确性。 机器海鸥基本的飞行功能是依靠其传动与扑动机构和机电系统来实现的。低 层次的抵抗外力干扰的能力一方面是依靠双翼在扑动时的对称性来保证,另一方 面还需要依靠尾翼的调节作用。高层次的抵抗干扰的能力则需要依靠机器海鸥自 身携带的多种传感器——加速度传感器、陀螺仪以及位置传感器等,在对运动信 息进行解算以后将数据反馈到执行元件来实时调节机器海鸥的姿态
哈尔滨工业大学工程硕士学位论文 2.3.2功能设计 机器海鸥要达到在飞行时的优异性能,这注定是一项异常复杂的工作。现根 据预期的作业内容要求对其任务需求加以分析,这些内容主要包括: (1)基本的运动功能要能模仿鸟类的扑翼运动实现飞行功能,扑动动作要 能够产生足够的升力以平衡机器海鸥自身的重力,这些都要求机器海鸥具备较强 的运动能力; (2)遥操作功能对于机器海鸥的控制,在实现完全的自主控制以前,对其 要能具有最基本的遥操作功能。遥操作功能能够保证机器海鸥按照指定的速度和 方向飞行,使其始终保持在人为可控的范围内: (3)监测功能监测功能是机器海鸥的一个目的功能需求,在达到最终的能 够通过视觉与图像进行监测与跟踪的目的之前,要至少能够初步实现对于周围环 境信息的监测一一风速、气压和磁场信息等。此外,除了要能够监测环境信息以 外,机器海鸥还要能够至少对于其自身的状态信息进行监测,比如一些位置信息、 速度加速度信息等,这样可以通过利用这些信息来实时调节和改变机器海鸥的飞 行状态以达到预期的目的与功能任务: (4)环境适应性机器海鸥工作的环境无疑是非常复杂的,这就要求其能够 具有足够的环境适应能力来抵抗恶劣的气候条件。对于环境的适应性建立在机器 海鸥对于环境信息的感知与利用上面,这些也都要求机器海鸥能够充分并且高效 地利用好环境状态信息,以及合理地调节好其自身的执行器以用于调节机身的姿 态与动作: (5)智能化在机器海鸥实现了最基本的飞行与环境信息监测功能以后,就 需要拓展其在完全自主的条件下根据任务需求自主规划飞行方案、飞行路径与监 测目标等,亦即实现机器海鸥的高度智能化功能。 根据我们要研制的这款机器海鸥,我们对于具有类似飞行功能的扑翼机以及 具有相当尺寸与外形的鸟类和其他飞行生物等进行了一定的调研,对于他们的飞 行机理做出了如下简单的整理归纳,本文中所研制的原理样机就是完全基于这些 理论基础而展开的。其次则是在此基础上开始规划所要研制样机的一些具体功能 以及性能参数。 2.3.2.1扑翼飞行的原理简介 (1)对于鸟类来说,不同翼型的翅膀适合以不同的速度飞行。 (2)一般来说,飞行生物的个体尺寸越大,其飞行时扑翼的频率越低,其飞 行的速度也一般较慢;反之,体型越小则扑动的频率越高,飞行的速度也越快。 -12-
哈尔滨工业大学工程硕士学位论文 - 12 - 2.3.2 功能设计 机器海鸥要达到在飞行时的优异性能,这注定是一项异常复杂的工作。现根 据预期的作业内容要求对其任务需求加以分析,这些内容主要包括: (1)基本的运动功能 要能模仿鸟类的扑翼运动实现飞行功能,扑动动作要 能够产生足够的升力以平衡机器海鸥自身的重力,这些都要求机器海鸥具备较强 的运动能力; (2)遥操作功能 对于机器海鸥的控制,在实现完全的自主控制以前,对其 要能具有最基本的遥操作功能。遥操作功能能够保证机器海鸥按照指定的速度和 方向飞行,使其始终保持在人为可控的范围内; (3)监测功能 监测功能是机器海鸥的一个目的功能需求,在达到最终的能 够通过视觉与图像进行监测与跟踪的目的之前,要至少能够初步实现对于周围环 境信息的监测——风速、气压和磁场信息等。此外,除了要能够监测环境信息以 外,机器海鸥还要能够至少对于其自身的状态信息进行监测,比如一些位置信息、 速度加速度信息等,这样可以通过利用这些信息来实时调节和改变机器海鸥的飞 行状态以达到预期的目的与功能任务; (4)环境适应性 机器海鸥工作的环境无疑是非常复杂的,这就要求其能够 具有足够的环境适应能力来抵抗恶劣的气候条件。对于环境的适应性建立在机器 海鸥对于环境信息的感知与利用上面,这些也都要求机器海鸥能够充分并且高效 地利用好环境状态信息,以及合理地调节好其自身的执行器以用于调节机身的姿 态与动作; (5)智能化 在机器海鸥实现了最基本的飞行与环境信息监测功能以后,就 需要拓展其在完全自主的条件下根据任务需求自主规划飞行方案、飞行路径与监 测目标等,亦即实现机器海鸥的高度智能化功能。 根据我们要研制的这款机器海鸥,我们对于具有类似飞行功能的扑翼机以及 具有相当尺寸与外形的鸟类和其他飞行生物等进行了一定的调研,对于他们的飞 行机理做出了如下简单的整理归纳,本文中所研制的原理样机就是完全基于这些 理论基础而展开的。其次则是在此基础上开始规划所要研制样机的一些具体功能 以及性能参数。 2.3.2.1 扑翼飞行的原理简介 (1)对于鸟类来说,不同翼型的翅膀适合以不同的速度飞行。 (2)一般来说,飞行生物的个体尺寸越大,其飞行时扑翼的频率越低,其飞 行的速度也一般较慢;反之,体型越小则扑动的频率越高,飞行的速度也越快