
上浒充通大学 8.2.2控制象统基本方式 SHANGHAI JLAO TONG UNIVERSITY 2)闭环控制方式 在反馈控制系统中,被控变量送回输入端,与设定值进行 比较,根据偏差进行控制,控制被控变量,整个系统构成一个 闭环,成为闭环控制。 优点: 缺点: 无论何种原因引起被控变 发生扰动引起被控变量变化后才产 量偏离设定值,只要出现 生控制作用,控制不够及时。 偏差,就会有控制作用 内部各环节配合不当,引起系统剧 使偏差减小或消除,使得 烈振荡,使系统失去控制作用。 被控变量与设定值一致。 16
16 8.2.2 控制系统基本方式 在反馈控制系统中,被控变量送回输入端,与设定值进行 比较,根据偏差进行控制,控制被控变量,整个系统构成一个 闭环,成为闭环控制。 优点: 无论何种原因引起被控变 量偏离设定值,只要出现 偏差,就会有控制作用, 使偏差减小或消除,使得 被控变量与设定值一致。 缺点: 发生扰动引起被控变量变化后才产 生控制作用,控制不够及时。 内部各环节配合不当,引起系统剧 烈振荡,使系统失去控制作用。 2) 闭环控制方式
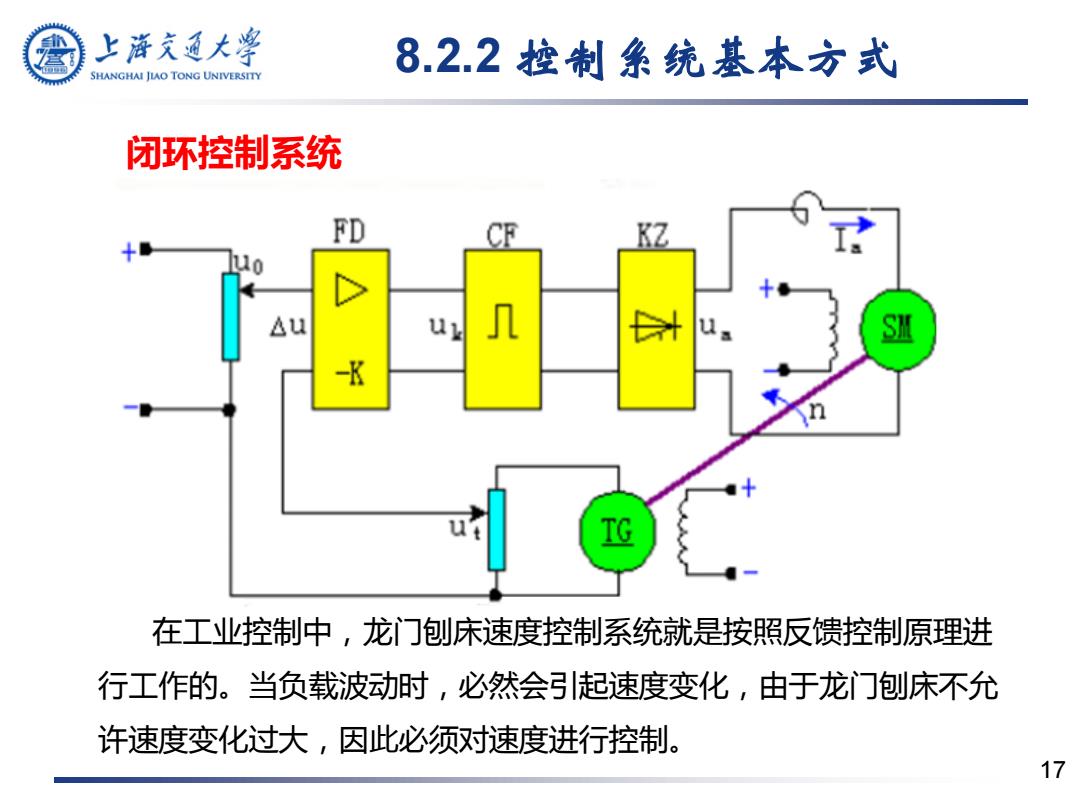
上浒充通大学 8.2.2控制象统基本方式 SHANGHAI JLAO TONG UNIVERSITY 闭环控制系统 u SI K TG 在工业控制中,龙门刨床速度控制系统就是按照反馈控制原理进 行工作的。当负载波动时,必然会引起速度变化,由于龙门刨床不允 许速度变化过大,因此必须对速度进行控制。 17
17 8.2.2 控制系统基本方式 在工业控制中,龙门刨床速度控制系统就是按照反馈控制原理进 行工作的。当负载波动时,必然会引起速度变化,由于龙门刨床不允 许速度变化过大,因此必须对速度进行控制。 闭环控制系统

上游充通大学 SHANGHAI JLAO TONG UNIVERSITY 8.2.2控制系统基本方式 闭环控制系统 M↑→n↓→u↓=△u=(u,-u)个 M: →uk个→u,个→n个 0 n N 0 u △u △u 0 :t 0 ti t2 18
18 8.2.2 控制系统基本方式 u u n M n u u u u k a ( ) 1 0 1 闭环控制系统
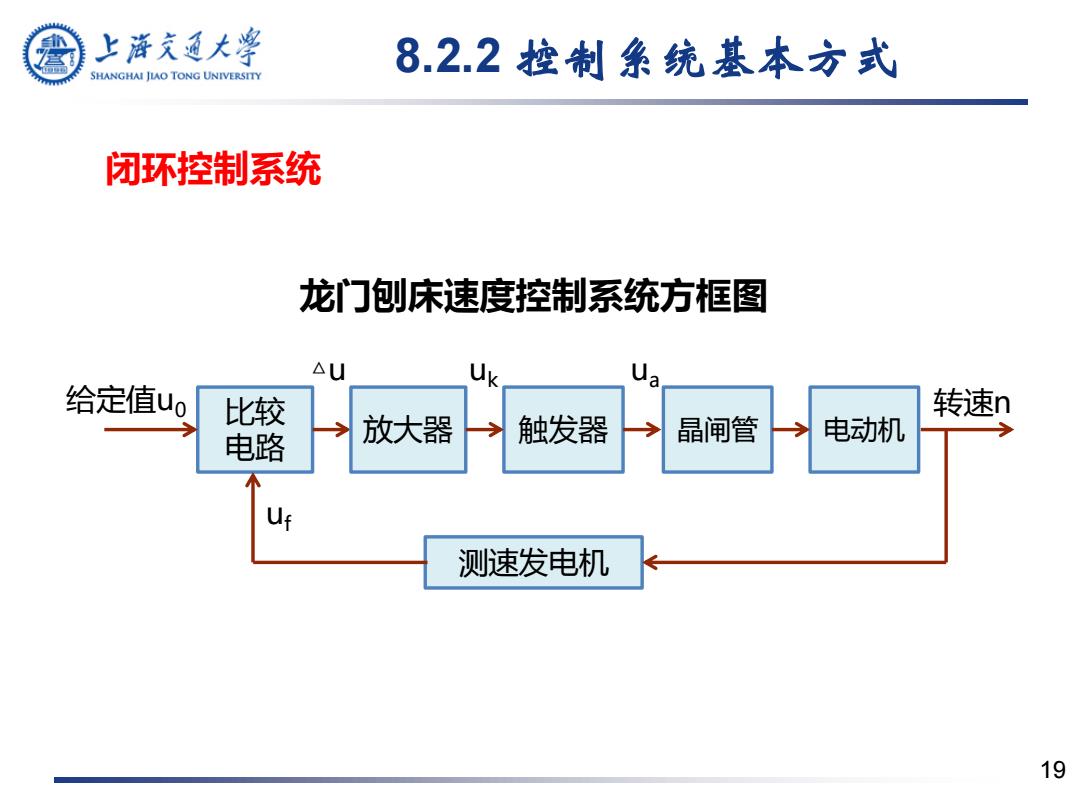
上游充通大学 8.2.2控制系统基本六式 SHANGHAI JLAO TONG UNIVERSITY 闭环控制系统 龙门刨床速度控制系统方框图 ^u Uk 给定值u0 比较 转速n 电路 放大器 触发器 晶闸管 电动机 Uf 测速发电机 19
19 8.2.2 控制系统基本方式 比较 电路 触发器 晶闸管 给定值u0 转速n 放大器 测速发电机 电动机 △u uk ua uf 龙门刨床速度控制系统方框图 闭环控制系统

上游充通大学 8.2.2控制系统基本方式 SHANGHAI JLAO TONG UNIVERSITY 反馈控制系统基本组成 输入量 串连补偿 放大 执行 被控 输出量 元件 元件 元件 对象 局部反馈 反馈补偿元件 主反馈 测量元件 信号从输入端到达输出端的传输通路称为前向通路;系统输出量经测 量元件反馈到输入端的传输通路称为主反馈通路。 前向通路与主反馈通路共同构成主回路,此外还有局部反馈通路。 只包含一个主反馈通路的系统称为单回路系统,有两个或两个以上反 馈通路的系统称为多回路系统。 20
20 8.2.2 控制系统基本方式 信号从输入端到达输出端的传输通路称为前向通路;系统输出量经测 量元件反馈到输入端的传输通路称为主反馈通路。 前向通路与主反馈通路共同构成主回路,此外还有局部反馈通路。 只包含一个主反馈通路的系统称为单回路系统,有两个或两个以上反 馈通路的系统称为多回路系统。 串连补偿 元件 放大 元件 执行 元件 被控 对象 反馈补偿元件 测量元件 输入量 主反馈 局部反馈 输出量 — — 反馈控制系统基本组成