园 上活我大峰 eb口 LECTURE 6 Vector fundamentals for kinematic analysis 1日 国 上泽充通大警 OUTLINE Why kinematic analysis Space of motion Vector manipulations Motion as vectors Instantaneous velocity center ME337 Design Manufacturing ll
Vector fundamentals for kinematic analysis LECTURE 6 ME337 Design & Manufacturing II OUTLINE Why kinematic analysis Space of motion Vector manipulations Motion as vectors Instantaneous velocity center
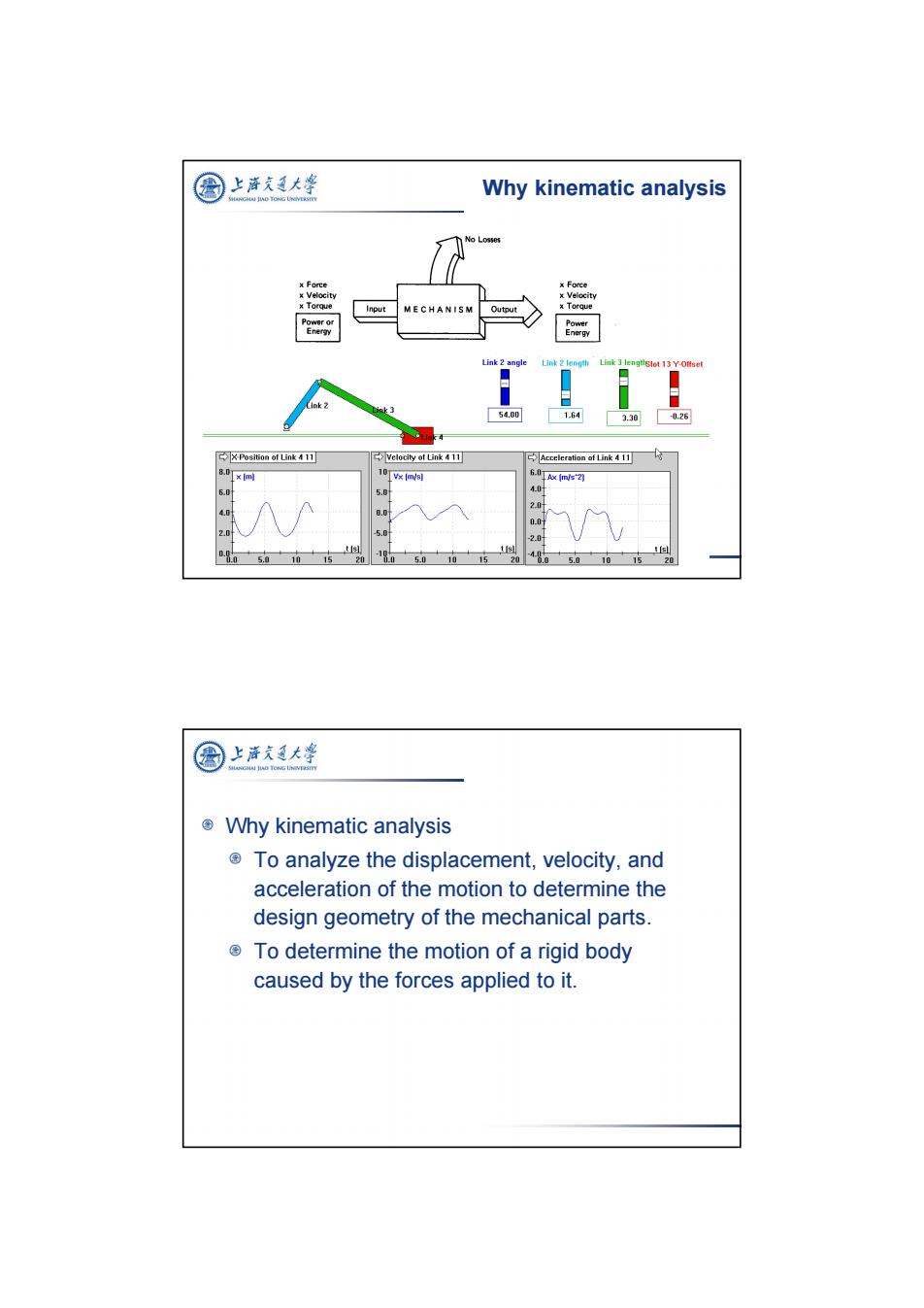
园 上活我大峰 Why kinematic analysis x Force x Force x Velocity x Velocity ×Torque Input Output x Torque P Power Energy Link 2 angle 54.00 1.64 3.30 0.26 X-Position of Link41可 Velocity of Link41▣ Acceleration of Link 4 11 .×m 10 Vx [enisl -0 A m) 5.0 2 2.0 5.D 2.0 10 5.016 15 20 国 上游文通大学 Why kinematic analysis To analyze the displacement,velocity,and acceleration of the motion to determine the design geometry of the mechanical parts. To determine the motion of a rigid body caused by the forces applied to it
Why kinematic analysis Why kinematic analysis To analyze the displacement, velocity, and acceleration of the motion to determine the design geometry of the mechanical parts. To determine the motion of a rigid body caused by the forces applied to it
国上活大峰 © Displacement analysis 1)to determine the output displacement and check if it meets the requirements. 2)to find the stroke or output workspace. 3)to avoid space interferences. ©Velocity analysis 1)the basis for further analysis 2)to find the velocity characteristics of the output,then check if it meets the requirements. (such as quick return mechanism) 圆上泽大华 Acceleration analysis 1)to find the inertial forces 2)to determine the dynamic performances of the output
Displacement analysis 1) to determine the output displacement and check if it meets the requirements. 2) to find the stroke or output workspace. 3) to avoid space interferences. Velocity analysis 1) the basis for further analysis 2) to find the velocity characteristics of the output, then check if it meets the requirements. (such as quick return mechanism…) Acceleration analysis 1) to find the inertial forces 2) to determine the dynamic performances of the output
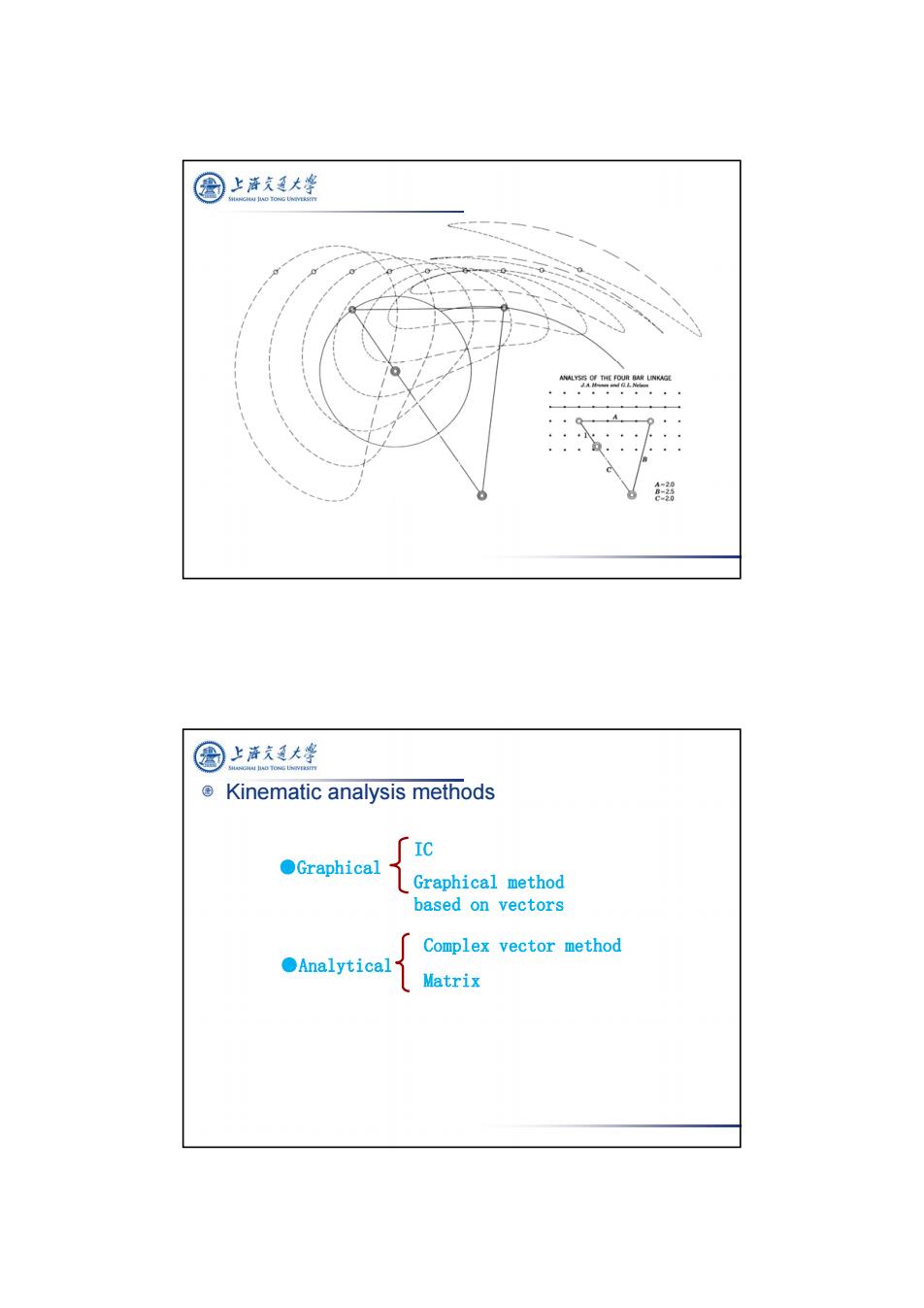
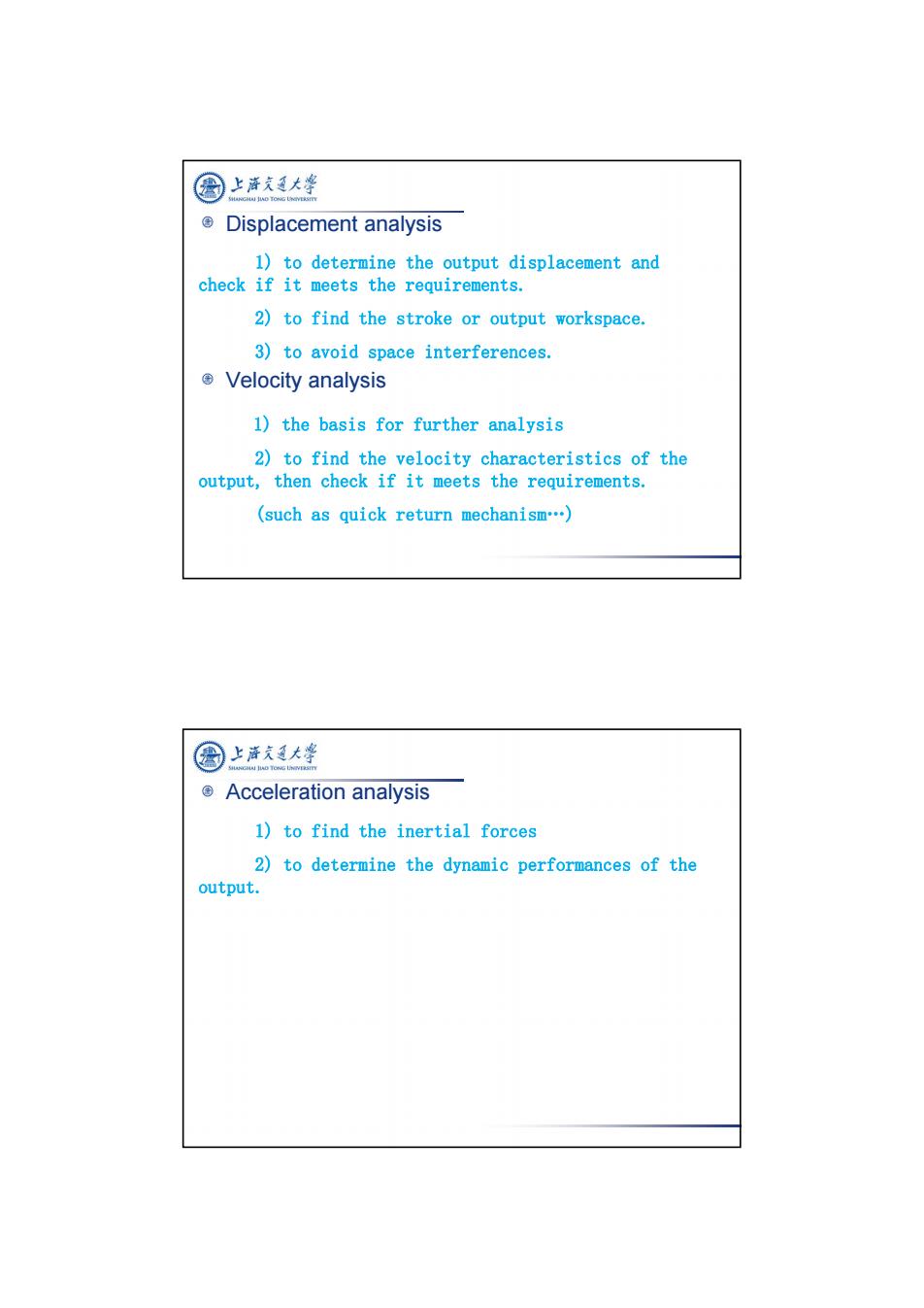
图上泽通大学 ANALYSS OF THE FOURAR LNKAGE 0+ 锦 国上活庆大峰 Kinematic analysis methods IC ●Graphical Graphical method based on vectors Complex vector method ●Analytical Matrix
Kinematic analysis methods ●Graphical ●Analytical IC Graphical method based on vectors Complex vector method Matrix
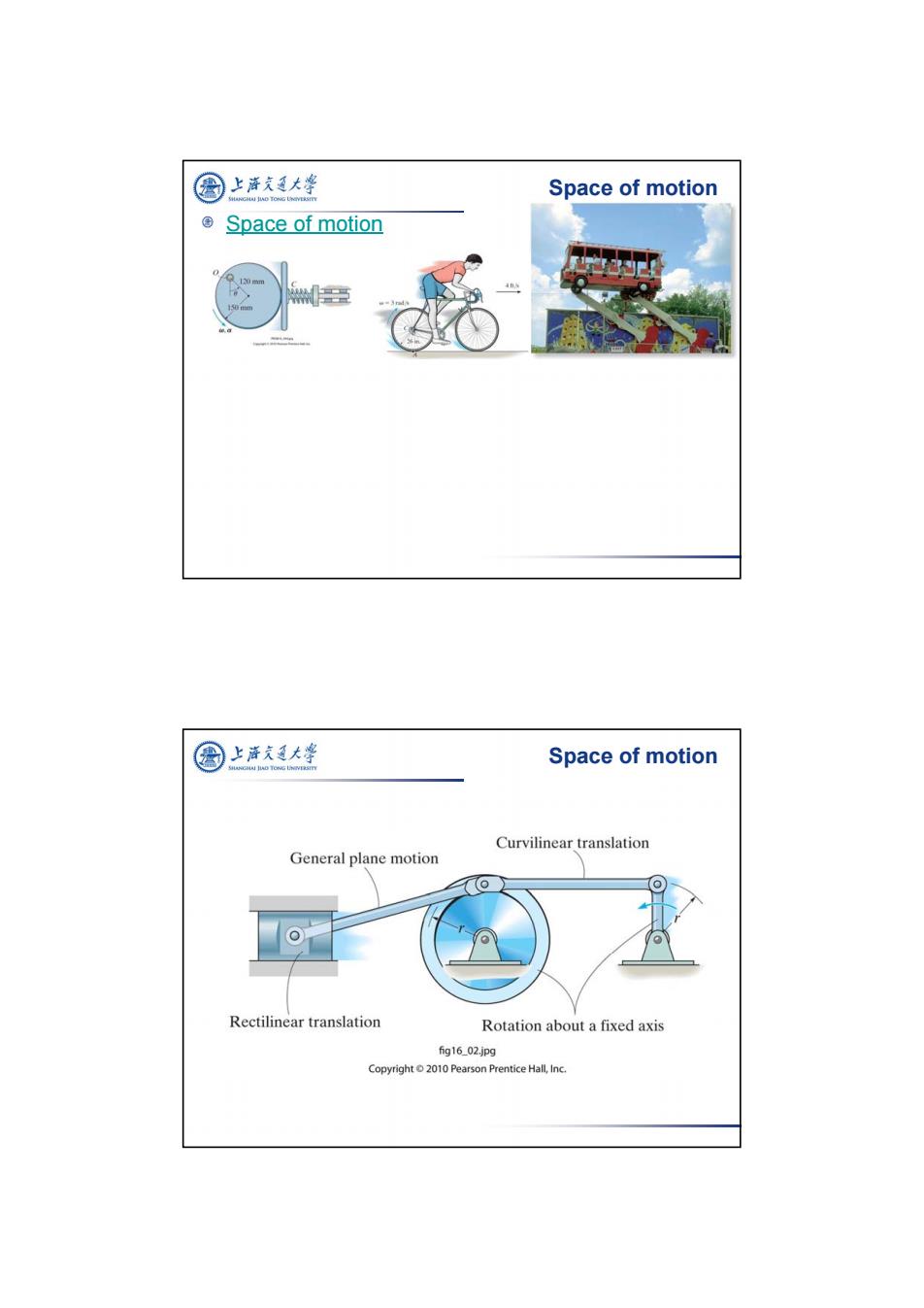
国 上浒充通大¥ Space of motion Space of motion 国上序庆大¥ Space of motion Curvilinear translation General plane motion o Rectilinear translation Rotation about a fixed axis fig16_02.jpg Copyright 2010 Pearson Prentice Hall,Inc
Space of motion Space of motion Space of motion