第3卷第1期 智能系统学报 Vol.3 Ne 1 2008年2月 CAAI Transactions on Intelligent Systems Fcb.2008 概率规划的研究与发展 闫书亚,殷明浩2,谷文祥1,刘小飞 (1.东北师范大学计算机学院,吉林长春130117:2.吉林大学计算机科学技术学院,吉林长春130012) 摘要:概率规划是智能规划研究的一个重要方面,首先给出概率规划领域定义语言,并介绍其语法及语义,随后 重点介绍了求解概率规划的各种方法,如动态规划、启发式动态规划和基于规划图的方法等,并分析了各种方法的 特点.最后对国际概率规划比赛进行了介绍. 关键词:智能规划:概率规划:动态规划:概率规划领域定义语言 中图分类号:TP18文献标识码:A文章编号:1673-4785(2008)01-000914 Research and advances in proba bilistic planning YAN Shurya',YIN Ming-hao'2,GU Wemxiang',LIU Xiao-fei' (1.School of Computer,Northeast Normal University,Changchun 130117,China;2.College of Computer Science and Tech- nology,Jilin University,Changchun 130012,China) Abstract:Probabilistic planning has an important role in allowing intelligent planning to adapt to uncertain- ty.This paper introduces a new probabilistic plan domain definition language (PPDDL),followed by its syntax and semantics.Various methods of probabilistic planning are described,such as dynamic program- ming algorithms,heuristic dynamic programming algorithms and algorithms based on planning graph.The features of each algorithm are then analyzed.Finally,we give a brief introduction to the international probabilistic planning competition.The conclusions in this paper should be helpful to researchers interest- ed in this field. Key words:intelligent planning;probabilistic planning;dynamic programming;PPDDL 智能规划是当前人工智能领域中极为活跃的一[2-5]中,Wld等人提出了一致性规划问题,在这 个研究热点,近10年来,有关智能规划的研究在 类规划问题中,Agent需要考虑到初始状态和动作 问题描述和问题求解两方面得到了新的突破.相对 的不确定性;感知规划问题需要在规划执行过程中 于早期的智能规划系统,现代规划系统无论在规划 考虑感知动作6刃;时态规划问题和资源规划问题 求解效率上还是在规划求解规模上都有指数级的提 在生成规划解时需要考虑时态约束和资源约 高.然而,经典智能规划要求知识的完整性,即 束山:概率规划问题通过使用概率分布来刻画动 假设Agent对于规划世界的知识是完全的,规划过 作效果的不确定性,试图找到完成规划目标的最大 程中动作的效果是确定的,但是,在现实世界中得 概率规划解.事实上,非经典规划问题的研究 到的信息往往是不完全、不确定的,这就使规划理 已经成为目前人工智能规划领域研究的主要研究领 论的应用范围受到极大的限制. 域之一.在2004年举办的第4届国际智能规划竞 针对这些问题,国内外很多研究人员开始寻找 赛中,智能规划研究人员举办了第1届概率规划组 更一般的算法来处理这些不确定性问题.在文献 的比赛;在2006年的第5届智能规划竞赛中,同样 有概率组的比赛.人工智能研究杂志(journal of ar 收稿日期:2007-0719. 基金项目:因家自然科学基金资助项目(60573067,60473042):东北 tificial intelligence research,JAIR)组织专f刊以发 师范大学青年自然科学基金资助项目(20070601). 表参加比赛的智能规划系统的研究报告.人工智能 通讯作者:闫书亚.E-mail:yansy276@nenu.edu.cn. 杂志在2003年也组织了一期专刊用于介绍和推广 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net
第 3 卷第 1 期 智 能 系 统 学 报 Vol. 3 №. 1 2008 年 2 月 CAA I Transactions on Intelligent Systems Feb. 2008 概率规划的研究与发展 闫书亚1 , 殷明浩1 ,2 , 谷文祥1 , 刘小飞1 (1. 东北师范大学 计算机学院 ,吉林 长春 130117 ; 2. 吉林大学 计算机科学技术学院 ,吉林 长春 130012) 摘 要 :概率规划是智能规划研究的一个重要方面 , 首先给出概率规划领域定义语言 , 并介绍其语法及语义 , 随后 重点介绍了求解概率规划的各种方法 , 如动态规划、启发式动态规划和基于规划图的方法等 , 并分析了各种方法的 特点. 最后对国际概率规划比赛进行了介绍. 关键词 :智能规划 ; 概率规划 ; 动态规划 ; 概率规划领域定义语言 中图分类号 : TP18 文献标识码 :A 文章编号 :167324785 (2008) 0120009214 Research and advances in probabilistic planning YAN Shu2ya 1 , YIN Ming2hao 1 ,2 , GU Wen2xiang 1 , L IU Xiao2fei 1 (1. School of Computer , Northeast Normal University , Changchun 130117 , China ; 2. College of Computer Science and Tech2 nology , Jilin University , Changchun 130012 , China) Abstract :Probabilistic planning has an important role in allowing intelligent planning to adapt to uncertain2 ty. This paper introduces a new probabilistic plan domain definition language (PPDDL) , followed by its syntax and semantics. Various met hods of probabilistic planning are described , such as dynamic program2 ming algorit hms , heuristic dynamic programming algorit hms and algorithms based on planning grap h. The feat ures of each algorithm are t hen analyzed. Finally , we give a brief introduction to the international probabilistic planning competition. The conclusions in t his paper should be helpf ul to researchers interest2 ed in t his field. Keywords : intelligent planning ; probabilistic planning ; dynamic programming ; PPDDL 收稿日期 :2007207219. 基金项目 :国家自然科学基金资助项目(60573067 , 60473042) ;东北 师范大学青年自然科学基金资助项目(20070601) . 通讯作者 :闫书亚. E2mail :yansy276 @nenu. edu. cn. 智能规划是当前人工智能领域中极为活跃的一 个研究热点 , 近 10 年来 , 有关智能规划的研究在 问题描述和问题求解两方面得到了新的突破. 相对 于早期的智能规划系统 , 现代规划系统无论在规划 求解效率上还是在规划求解规模上都有指数级的提 高[1 ] . 然而 , 经典智能规划要求知识的完整性 , 即 假设 Agent 对于规划世界的知识是完全的 , 规划过 程中动作的效果是确定的 , 但是 , 在现实世界中得 到的信息往往是不完全、不确定的 , 这就使规划理 论的应用范围受到极大的限制. 针对这些问题 , 国内外很多研究人员开始寻找 更一般的算法来处理这些不确定性问题. 在文献 [225 ]中 , Weld 等人提出了一致性规划问题 , 在这 类规划问题中 , Agent 需要考虑到初始状态和动作 的不确定性 ; 感知规划问题需要在规划执行过程中 考虑感知动作[627 ] ; 时态规划问题和资源规划问题 在生 成 规 划 解 时 需 要 考 虑 时 态 约 束 和 资 源 约 束[8211 ] ; 概率规划问题通过使用概率分布来刻画动 作效果的不确定性 ,试图找到完成规划目标的最大 概率规划解[12214 ] . 事实上 , 非经典规划问题的研究 已经成为目前人工智能规划领域研究的主要研究领 域之一. 在 2004 年举办的第 4 届国际智能规划竞 赛中 ,智能规划研究人员举办了第 1 届概率规划组 的比赛 ; 在 2006 年的第 5 届智能规划竞赛中 , 同样 有概率组的比赛. 人工智能研究杂志(journal of ar2 tificial intelligence research , J AIR) 组织专刊以发 表参加比赛的智能规划系统的研究报告. 人工智能 杂志在 2003 年也组织了一期专刊用于介绍和推广
·10· 智能系统学报 第3卷 不确定规划问题.概率规划问题作为不确定规划问 的前提和效果不涉及变量reward. 题,也得到了研究者的广泛关注,其求解方法也日 图1显示了咖啡传送域11的PPDDL语言表 趋成熟.文中首先对概率规划问题进行介绍,然后 示,当“buy-coffee”动作执行时,如果使用者得到了 着重介绍解决概率规划问题的概率规划算法,并比 coffee,则获得0.8的回报.当在iswet为假时,执 较分析各种方法,最后对国际概率规划比赛进行了 行“buy-coffee”动作,获得的回报则是0.2.而当 介绍. user-has-coffee和iswet均为真的时候,得到的回 报则可以是1。 1概率规划表示 1.1概率规划领域定义语言 (define (domain coffee-delivery) 1998年,Drew McDermott提出了规划领域定 (requirements negative-preconditions 义语言(plan domain definition language,PDDL), disjunctive-preconditions :conditional-effects mdp) 随后PDDL逐渐成为规划领域模型表示和交流的 (predicates (imoffice)(raining)(hasumbrella) 通用标准,并成为国际智能规划比赛的标准语 (is wet)(hascoffee)(user-has-coffee)) 言o,516.2004年,H.H.Younes和M.Littman (:action buy-coffee 提出了PPDDL1.0以处理动作带有不确定效果的 effect (and (when (not (imroffice)) 概率规划问题),概率部分的比赛使用的语言即 (probabilistic 0.8 (has-coffee))) 是PPDDL1.018割. (when (user-has-coffee)(increase (reward)0.8))(when (not (is wet)) 1.2 PPDDL语法 (increase (reward)0.2)))) 相对于经典规划领域定义语言PDDL,PPD DL1.0增加了新的表达能力,主要包括2个方面, 即对概率效果的支持、对马尔可夫决策过程回报值 图1咖啡传送域的部分PPDDL编码 的支持.在概率规划中,动作的效果是随机的,因 Fig.1 Part of PPDDL encoding of"coffee delivery"domain 此PPDDL增加了对概率效果的支持,其语法表 如果在规划问题定义中没有明确定义一个规划 示为 尺度(planning metric),则求解一个概率规划问题 (probabilistic pie,.pes) 时默认的目标为寻找到一条最大化目标实现概率的 式中:e表示动作的一个可能效果,p,表示动作效 规划 果e:出现的概率,并且p:满足如下约束 1.3 PPDDL语义 p≥0,p=1. 一个基于PPDDL描述的概率规划问题通常可 以被映射为一个带有回报的概率转移系统(proba- 但有时也允许某个空的概率效果出现,即 bilistic transition system). (probabilistic pie,pre). 设V为一个概率规划问题的状态变量集合,状 式中:P:≤1 态s为对状态变量的一次赋值,则变量的所有可能 这种表示和下面的表示是等价的: 赋值的集合构成了概率规划问题的整个状态空间. (probabilistic pie,.preq (and)). pm:S0,1],∑spo()=1即m是状态上的 概率分布),V上的公式中刻画了目标状态G={ 式中:g=1-,P:,(and表示空效果 =$,动作集合A由动作概要实例化得到. 例如,(probabilistic0.9(clogged)表示命题 动作a∈A包含前提中。和效果e。.动作a在状 clogged以0.9的概率在下一状态中变为真,以0.1 态s上可用当且仅当s|=$,如果s|纯,在s上运 的概率保持原有真值。 用a则是错误的.这与PDDL2.1的语义是一致 另一方面,PPDDL使用关键字reward来表示 的.效果循环如下定义: 动作或规划的回报值,其基本语法表示为 l)T是空效果,在PPDDL中用(and)表示; (<additive-op><reward fluent <f-exp > 2)若b∈是一个布尔型状态变量,则b和7b 式中:<additive-op>为增加回报算子或减少回报 是其效果: 算子;<fep>是不包括reward的数值表达,动作 3)xf是一效果,如果x∈是一数值型状 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net
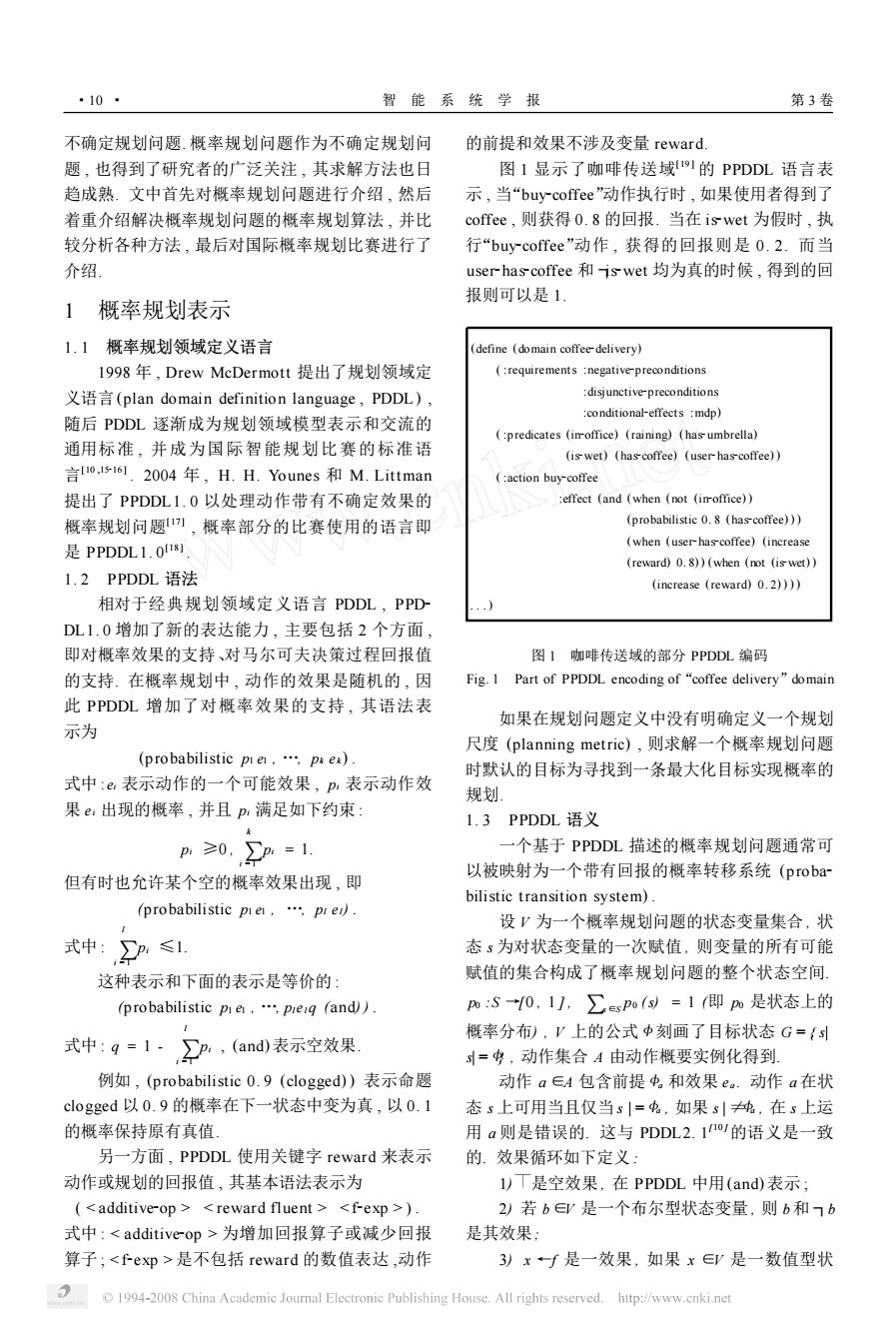
不确定规划问题. 概率规划问题作为不确定规划问 题 , 也得到了研究者的广泛关注 , 其求解方法也日 趋成熟. 文中首先对概率规划问题进行介绍 , 然后 着重介绍解决概率规划问题的概率规划算法 , 并比 较分析各种方法 , 最后对国际概率规划比赛进行了 介绍. 1 概率规划表示 1. 1 概率规划领域定义语言 1998 年 , Drew McDermott 提出了规划领域定 义语言(plan domain definition language , PDDL) , 随后 PDDL 逐渐成为规划领域模型表示和交流的 通用标准 , 并成为国际智能规划比赛的标准语 言[10 ,15216 ] . 2004 年 , H. H. Younes 和 M. Littman 提出了 PPDDL1. 0 以处理动作带有不确定效果的 概率规划问题[17 ] , 概率部分的比赛使用的语言即 是 PPDDL1. 0 [18 ] . 1. 2 PPDDL 语法 相对于经典规划领域定义语言 PDDL , PPD2 DL1. 0 增加了新的表达能力 , 主要包括 2 个方面 , 即对概率效果的支持、对马尔可夫决策过程回报值 的支持. 在概率规划中 , 动作的效果是随机的 , 因 此 PPDDL 增加了对概率效果的支持 , 其语法表 示为 (p robabilistic p1 e1 , …, pk ek ) . 式中 : ei 表示动作的一个可能效果 , pi 表示动作效 果 ei 出现的概率 , 并且 pi 满足如下约束 : pi ≥0 , ∑ k i = 1 pi = 1. 但有时也允许某个空的概率效果出现 , 即 (probabilistic p1 e1 , …, pl el) . 式中 : ∑ l i = 1 pi ≤1. 这种表示和下面的表示是等价的 : (probabilistic p1 e1 , …, plel q (and) ) . 式中 : q = 1 - ∑ l i = 1 pi , (and) 表示空效果. 例如 , (probabilistic 0. 9 (clogged) ) 表示命题 clogged 以 0. 9 的概率在下一状态中变为真 , 以 0. 1 的概率保持原有真值. 另一方面 , PPDDL 使用关键字 reward 来表示 动作或规划的回报值 , 其基本语法表示为 ( < additive2op > < reward fluent > < f2exp > ) . 式中 : < additive2op > 为增加回报算子或减少回报 算子 ; < f2exp > 是不包括 reward 的数值表达 ,动作 的前提和效果不涉及变量 reward. 图 1 显示了咖啡传送域[19 ] 的 PPDDL 语言表 示 , 当“buy2coffee”动作执行时 , 如果使用者得到了 coffee , 则获得 0. 8 的回报. 当在 is2wet 为假时 , 执 行“buy2coffee”动作 , 获得的回报则是 0. 2. 而当 user2has2coffee 和 ┐is2wet 均为真的时候 , 得到的回 报则可以是 1. (define (domain coffee2delivery) ( :requirements :negative2preconditions :disjunctive2preconditions :conditional2effects :mdp) ( :predicates (in2office) (raining) (has2umbrella) (is2wet) (has2coffee) (user2has2coffee) ) ( :action buy2coffee :effect (and (when (not (in2office) ) (probabilistic 0. 8 (has2coffee) ) ) (when (user2has2coffee) (increase (reward) 0. 8) ) (when (not (is2wet) ) (increase (reward) 0. 2) ) ) ) . . . ) 图 1 咖啡传送域的部分 PPDDL 编码 Fig. 1 Part of PPDDL encoding of“coffee delivery”domain 如果在规划问题定义中没有明确定义一个规划 尺度 (planning metric) , 则求解一个概率规划问题 时默认的目标为寻找到一条最大化目标实现概率的 规划. 1. 3 PPDDL 语义 一个基于 PPDDL 描述的概率规划问题通常可 以被映射为一个带有回报的概率转移系统 (proba2 bilistic transition system) . 设 V 为一个概率规划问题的状态变量集合 , 状 态 s 为对状态变量的一次赋值 , 则变量的所有可能 赋值的集合构成了概率规划问题的整个状态空间. p0 :S →[0 , 1 ] , ∑s ∈S p0 (s) = 1 (即 p0 是状态上的 概率分布) , V 上的公式 < 刻画了目标状态 G = { s| s| = <} , 动作集合 A 由动作概要实例化得到. 动作 a ∈A 包含前提 <a 和效果 e a . 动作 a 在状 态 s 上可用当且仅当 s | = <a , 如果 s | ≠<a , 在 s 上运 用 a 则是错误的. 这与 PDDL2. 1 [10 ]的语义是一致 的. 效果循环如下定义 : 1) 是空效果 , 在 PPDDL 中用(and) 表示 ; 2) 若 b∈V 是一个布尔型状态变量 , 则 b和 ┐b 是其效果; 3) x ←f 是一效果 , 如果 x ∈V 是一数值型状 · 01 · 智 能 系 统 学 报 第 3 卷
第1期 闫书亚,等:概率规划的研究与发展 ·11 态变量且∫是数值状态变量上的实值函数, 显然价值迭代算法和策略迭代算法可以用于求 4)r↑f是一效果,如果f是数值状态变量上 解上述问题 的实值函数: 2.1.1价值迭代算法 5)e个…八en是效果,如果e,em是 价值迭代算法(value iteration,VI))是求解 效果: MDP问题的一种经典的动态规划算法,它从任意 6)c>e是效果,如果c是V上的一个公式且e 的初始评估值开始,通过迭代来求解方程.令f:(s 是一个效果: 为状态s在第i次迭代中的评估值,那么价值迭代 )pme…|pmen是效果,如果a,en是 执行下述更新: 效果,对于所有i∈{1,n},p:≥0且 f(s)=min [c(a.s)+>T(s,a.s)f(s)1. >p.=1. 2 其中2)~4)称为简单效果,x一∫意为当前状 如果无限地应用贝尔曼更新方程,价值迭代最终会 态中的值f在下一状态变为数值状态变量x的值, 收敛在贝尔曼方程组的惟一解上.在这种情况下, 效果r↑∫用来与转移回报相联系 对应的策略是最优的 动作a=(虫,ea〉定义了一个转移概率矩阵P。 和转移回报矩阵R。,p表示在状态i上运用动作 (=arg ile(a.T(s.a.s)f(s)1. a,转移到状态j时的概率:表示在状态i上运用 (3) 动作a,转移到状态j时得到的回报.效果c>e定 对于s∈S,当lf:(-f1(s川≤e,价值迭 义了一组状态转移,其中e是简单效果的合取.计 代算法停止,其中£>0是给定的误差界限,即当评 算P。和Ra时,可首先将ea转化为p1e|…| 估函数∫足够接近于最优时,价值迭代算法停止: pmem,其中e是确定效果.具体的转化方法见文献 但是,由于V1更新每一个状态的值,它求解的过 187. 程是相当缓慢的.一个优化的措施是当它进行状态 当结果为多个效果pmel…pren时,具有同 更新时,对其进行限制,只更新那些从初始状态可 样的转移,这时要求一个特定转移的回报与结果是 以到达的状态的评估值 一致的 2.1.2策略迭代算法 2概率规划求解方法 价值迭代算法中,在每一时间步,评估函数只 是被用来计算动作,而策略则没有被显式地存储或 2.1动态规划算法 记录.策略迭代,在求解过程中则在存储更新评估 一个概率规划问题通常可以模型化为随机最短 值的同时也存储并更新策略的值, 路径问题(stochastic shortest path problems, 策略迭代算法从某个初始策略乃开始,交替 SSPs)2o).随机最短路径问题是一类特殊的马尔可 执行下面的2个步骤22-21: 夫决策问题(Markov decision problems,MDPs). 1)策略评价:确定当前策略的评估函数∫,即 SSPs为一个六元组:(S,A,T,c,G,S),其中, 给定策略刀,计算”; S是一组有限状态的集合:A是有限动作的集合, 2)策略改进:基于当前评估函数,更新当前策 对任一s∈S,A(表示在状态s上的可用动作的集 略,即当前策略π不是最优策略时,利用更新方 合;T是转移模型,即对在每个可能状态中的每种 程,找到一个新的策略π’,使得对任一状态, 行动的结果概率的详细说明.对于s,s’∈S,T(s, ∫”()≤f”(),并且至少存在一个状态i,使得 a,s')表示在状态s上执行动作a时到达状态s'的 f()<f(). 概率;c是代价函数,对任一s∈S,a∈A(s, 当策略改进步骤没有产生评估值的改变时,算 c(a,s表示在状态s上执行动作a的立即代价;G 法终止.对于有限的状态空间而言,策略数是有限 是目标集,GSS;S∈S是初始状态 的,并且每一次迭代都可以产生更好的策略,所以 这时,求解概率规划问题即转换为求解下述不 动点方程: 在有限次迭代后,算法会收敛于一个最优策略,并 终止 (=mc(a(s.a.s)f(s)1. 因为策略把每个状态中的行动都固定了,在第 1) i次迭代中,策略兀指定了状态s中的行动π:(s), 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net
态变量且 f 是数值状态变量上的实值函数; 4) r ↑f 是一效果 , 如果 f 是数值状态变量上 的实值函数; 5) e1 ∧ … ∧en 是效果 , 如果 e1 , …, en 是 效果; 6) c þ e 是效果 , 如果 c 是 V 上的一个公式且 e 是一个效果; 7) p1 e1 | …| pne n 是效果 , 如果 e1 , …, en 是 效果 , 对 于 所 有 i ∈{ 1 , …, n } , pi ≥0 且 ∑ n i = 1 pi = 1 . 其中 2) ~4) 称为简单效果 , x ←f 意为当前状 态中的值 f 在下一状态变为数值状态变量 x 的值 , 效果 r ↑f 用来与转移回报相联系. 动作 a =〈<a , ea〉定义了一个转移概率矩阵 Pa 和转移回报矩阵 Ra , p a ij 表示在状态 i 上运用动作 a , 转移到状态 j 时的概率; r a ij表示在状态 i 上运用 动作 a , 转移到状态 j 时得到的回报. 效果 c þ e 定 义了一组状态转移 , 其中 e 是简单效果的合取. 计 算 Pa 和 Ra 时 , 可首先将 ea 转化为 p1 e1 | … | pne n , 其中 ei 是确定效果. 具体的转化方法见文献 [18 ]. 当结果为多个效果 p1 e1 | …| pne n 时 , 具有同 样的转移 , 这时要求一个特定转移的回报与结果是 一致的. 2 概率规划求解方法 2. 1 动态规划算法 一个概率规划问题通常可以模型化为随机最短 路 径 问 题 ( stochastic shortest path problems , SSPs) [ 20 ] . 随机最短路径问题是一类特殊的马尔可 夫决策问题 (Markov decision problems , MDPs) . SSPs 为一个六元组〈: S , A , T , c , G, S0 〉, 其中 , S 是一组有限状态的集合; A 是有限动作的集合 , 对任一 s ∈S , A (s) 表示在状态 s′上的可用动作的集 合; T 是转移模型 , 即对在每个可能状态中的每种 行动的结果概率的详细说明. 对于 s, s’∈S , T (s, a , s’) 表示在状态 s 上执行动作 a 时到达状态 s’的 概率; c 是代价函数 , 对任一 s ∈S , a ∈A ( s) , c( a , s) 表示在状态 s 上执行动作 a 的立即代价; G 是目标集 , G ΑS ; S0 ∈S 是初始状态. 这时 , 求解概率规划问题即转换为求解下述不 动点方程[21 ] : f (s) = min a∈A (s) [ c( a ,s) + s′∑∈S T (s, a ,s′) f (s′) ]. (1) 显然价值迭代算法和策略迭代算法可以用于求 解上述问题. 2. 1. 1 价值迭代算法 价值迭代算法 ( value iteration , VI) 是求解 MDP 问题的一种经典的动态规划算法 , 它从任意 的初始评估值开始 , 通过迭代来求解方程. 令 f i (s) 为状态 s 在第 i 次迭代中的评估值 , 那么价值迭代 执行下述更新 : f i+1 (s) = min a∈A (s) [ c( a ,s) + s′∑∈S T (s, a ,s′) f (s′) ]. (2) 如果无限地应用贝尔曼更新方程 , 价值迭代最终会 收敛在贝尔曼方程组的惟一解上. 在这种情况下 , 对应的策略是最优的. π(s) = arg min a ∈A (s) [ c( a ,s) + s′∑∈S T (s, a ,s′) f (s′) ]. (3) 对于 Πs ∈S , 当| f i (s) - f i - 1 (s) | ≤ε, 价值迭 代算法停止 , 其中ε> 0 是给定的误差界限 , 即当评 估函数 f 足够接近于最优时 , 价值迭代算法停止. 但是 , 由于 V I 更新每一个状态的值 , 它求解的过 程是相当缓慢的. 一个优化的措施是当它进行状态 更新时 , 对其进行限制 , 只更新那些从初始状态可 以到达的状态的评估值. 2. 1. 2 策略迭代算法 价值迭代算法中 , 在每一时间步 , 评估函数只 是被用来计算动作 , 而策略则没有被显式地存储或 记录. 策略迭代 , 在求解过程中则在存储更新评估 值的同时也存储并更新策略的值. 策略迭代算法从某个初始策略π0 开始 , 交替 执行下面的 2 个步骤[22223 ] : 1) 策略评价 : 确定当前策略的评估函数 f , 即 给定策略π, 计算 f π ; 2) 策略改进 : 基于当前评估函数 , 更新当前策 略 , 即当前策略π不是最优策略时 , 利用更新方 程 , 找到一个新的策略 π’, 使得对任一状态 i , f π’( i) ≤f π ( i) , 并且至少存在一个状态 i , 使得 f π’( i) < f π ( i) . 当策略改进步骤没有产生评估值的改变时 , 算 法终止. 对于有限的状态空间而言 , 策略数是有限 的 , 并且每一次迭代都可以产生更好的策略 , 所以 在有限次迭代后 , 算法会收敛于一个最优策略 , 并 终止. 因为策略把每个状态中的行动都固定了 , 在第 i 次迭代中 , 策略πi 指定了状态 s 中的行动πi (s) , 第 1 期 闫书亚 ,等 :概率规划的研究与发展 · 11 ·
·12 智能系统学报 第3卷 由此,可得到贝尔曼方程的一个简化版本2 状态空间. f9=c(g,9+y7s,,ss1. Kof等人以模拟自动车辆行驶路径的路径追 踪问题为例26),比较了几种不同算法2),得出 (4) RTDP能够快速收敛于一种次优策略,其后,其他 在求解规划的过程中,由于策略迭代要更新每 研究人员也以实验结果证明了较大状态空间问题中 个状态的策略,其求解速度也是相对缓慢的 该算法的快速收敛性.因而RTDP的最大优点是可 2.2启发式动态规划算法 以在较短的时间内得到一个较好的策略.但由于很 用动态规划方法求解规划问题起到了良好的效 多状态被频繁地更新,所以在每个状态上完全收敛 果.但是,这些算法在更新状态的评估值时,均考 的速度是非常慢的,这是其缺点之一.另外,RT 虑了所有状态的评估值或策略,对于大的状态空间 DP算法要求系统的状态是完全可观察的,但在现 问题,其复杂度是让人望而却步的.鉴于此,研究 实中却很难满足,因此,还需要改进算法,以提高 者将启发式技术引入到动态规划算法中,以提高求 效率或者解决更复杂的问题 解规划的效率.下面重点介绍几种启发式动态规划 2.2.2基于Labeled RTDP的方法 (heuristic search dynamic programming algo- 由于RTDP的收敛速度比较缓慢,Labeled rithms.HS/DP) RTDP(LRTDP)算法I引入一个标记方案,提高 2.2.1基于RTDP的方法 了RTDP的收敛速度,同时保留了RTDP的其他 1995年Barto等人提出了实时动态规划算法 优点 (real-time dynamic programming,RTDP)241, Labeled RTDP算法的标记功能由一个被称为 里的“实时”指的是动作必须在严格的时间约束下执 Checksolved的标记程序完成.它的主要思想是: 行,其实质是通过对Kof提出的LRTA*2)算法 当贪婪策略定义在状态s上的启发式值和从s出发 进行扩展,来解决随机最短路径问题.在RTDP算 利用贪婪选择策略可达的那些状态上的启发式值都 法中,并不对所有状态的评估函数进行更新,因而 收敛时,标记状态为可解状态(solved).状态s及 减少了状态空间,在一定的假设前提条件下,RT- 由s出发利用贪婪策略可达的那些状态组成的图称 DP收敛于一种最优策略, 为状态s的贪婪图(greedy graph),贪婪图中的状 RTDP在一个单一的执行路迹(trace)上模拟 态构成的集合成为状态s的贪婪封装集(greedy en- 贪婪策略,并使用贝尔曼更新方程更新它们访问到 velope).状态s被激活时,Checksolved程序开始 的状态的评估值.这里主要介绍tria-based RTDP 搜索以s为根结点的贪婪图,寻找是否存在误差大 算法.该算法通过将状态上的计算组织为Sequem- 于E的状态s',如果不存在误差大于e的状态,则 tial trials而求解规划问题.Sequential trials是一 标记s为可解状态且Checksolved(s)返回true,即 种一边试验一边修正试验方案的试验方法.一个 当值函数在状态s上收敛时,标记s为可解.如果 RTDP试验是一个路径,每一个试验包含一系列步 在状态s的贪婪封装集中出现误差大于ε的一个状 骤(steps)).在每一步骤中,根据前向一步或多步深 态s'时,状态s和与其相关的状态都要被更新 度搜索而选择动作,基于动作的结果,选择当前的 Checksolved(s)返▣false.Checksolved的代码在 状态.包含当前状态的一个状态子集的代价函数被 文献[13]中的算法3中给出,状态s的标记在程序 更新,也即控制器总是遵循与最近更新的最优评估 中用哈希表的1个比特位表示,记为s.solved,一 函数相对应的贪婪策略,通过这个策略来选择将要 个状态s被标记为可解当且仅当s.solved=true 执行的动作,基于被选择的这个动作来更新当前状 LRTDP算法通过模拟试验实现,除了终止条件不 态.在每一个试验的开始,当前状态被设置为开始 同,它与RTDP的试验非常相似.实验从初始状态 状态,当到达目标状态或经过一定的步骤数之后,开始,以贪婪策略π,选择动作,以相应的转移概率 试验结束.RTDP反复执行这样的试验,直至收 选择后继状态,直到到达一个可解状态时实验结束 敛.RTDP的一个重要特性是,它只更新从初始状 (初始时只有目标状态是可解状态).每次实验结 态能够到达的那些状态的评估值,可能忽略了状态 束,调用标记程序Checksolved,反向核对状态的 空间中的许多状态,因而可以相对比较快地产生一 值函数的值,从最后一个不可解状态(unsolved)开 个相对比较好的策略.文献[24]证明在确定性合理 始回溯遍历到%,直到程序在一些状态上返回 条件下,RTDP逐渐收敛于最优解而不用估计整个 false.当初始状态so被标记为可解时,Labeled 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net
由此 , 可得到贝尔曼方程的一个简化版本[22 ] : f i (s) = c(πi (s) ,s) +γ s′∑∈S T (s,πi (s) ,s′) f i (s′) . (4) 在求解规划的过程中 , 由于策略迭代要更新每 个状态的策略 , 其求解速度也是相对缓慢的. 2. 2 启发式动态规划算法 用动态规划方法求解规划问题起到了良好的效 果. 但是 , 这些算法在更新状态的评估值时 , 均考 虑了所有状态的评估值或策略 , 对于大的状态空间 问题 , 其复杂度是让人望而却步的. 鉴于此 ,研究 者将启发式技术引入到动态规划算法中 , 以提高求 解规划的效率. 下面重点介绍几种启发式动态规划 算法( heuristic search / dynamic programming algo2 rit hms , HS/ DP) . 2. 2. 1 基于 R TD P 的方法 1995 年 Barto 等人提出了实时动态规划算法 (real2time dynamic programming , RTDP) [24 ] , 这 里的“实时”指的是动作必须在严格的时间约束下执 行 , 其实质是通过对 Korf 提出的 LRTA 3 [25 ] 算法 进行扩展 , 来解决随机最短路径问题. 在 RTDP 算 法中 , 并不对所有状态的评估函数进行更新 , 因而 减少了状态空间 , 在一定的假设前提条件下 , RT2 DP 收敛于一种最优策略. RTDP 在一个单一的执行路迹 (trace) 上模拟 贪婪策略 , 并使用贝尔曼更新方程更新它们访问到 的状态的评估值. 这里主要介绍 trial2based RTDP 算法. 该算法通过将状态上的计算组织为 Sequen2 tial trials 而求解规划问题. Sequential trials 是一 种一边试验一边修正试验方案的试验方法. 一个 RTDP 试验是一个路径 , 每一个试验包含一系列步 骤(step s) . 在每一步骤中 , 根据前向一步或多步深 度搜索而选择动作 , 基于动作的结果 , 选择当前的 状态. 包含当前状态的一个状态子集的代价函数被 更新 , 也即控制器总是遵循与最近更新的最优评估 函数相对应的贪婪策略 , 通过这个策略来选择将要 执行的动作 , 基于被选择的这个动作来更新当前状 态. 在每一个试验的开始 , 当前状态被设置为开始 状态 , 当到达目标状态或经过一定的步骤数之后 , 试验结束. RTDP 反复执行这样的试验 , 直至收 敛. RTDP 的一个重要特性是 , 它只更新从初始状 态能够到达的那些状态的评估值 , 可能忽略了状态 空间中的许多状态 , 因而可以相对比较快地产生一 个相对比较好的策略. 文献[24 ]证明在确定性合理 条件下 , RTDP 逐渐收敛于最优解而不用估计整个 状态空间. Korf 等人以模拟自动车辆行驶路径的路径追 踪问题为例[26 ] , 比较了几种不同算法[27 ] , 得出 RTDP 能够快速收敛于一种次优策略 ; 其后 , 其他 研究人员也以实验结果证明了较大状态空间问题中 该算法的快速收敛性. 因而 RTDP 的最大优点是可 以在较短的时间内得到一个较好的策略. 但由于很 多状态被频繁地更新 , 所以在每个状态上完全收敛 的速度是非常慢的 , 这是其缺点之一. 另外 , RT2 DP 算法要求系统的状态是完全可观察的 , 但在现 实中却很难满足. 因此 , 还需要改进算法 , 以提高 效率或者解决更复杂的问题. 2. 2. 2 基于 Labeled RTDP 的方法 由于 RTDP 的收敛速度比较缓慢 , Labeled RTDP(LRTDP) 算法[ 13 ] 引入一个标记方案 , 提高 了 RTDP 的收敛速度 , 同时保留了 RTDP 的其他 优点. Labeled RTDP 算法的标记功能由一个被称为 Checksolved 的标记程序完成. 它的主要思想是 : 当贪婪策略定义在状态 s 上的启发式值和从 s 出发 利用贪婪选择策略可达的那些状态上的启发式值都 收敛时 , 标记状态为可解状态 (solved) . 状态 s 及 由 s 出发利用贪婪策略可达的那些状态组成的图称 为状态 s 的贪婪图 (greedy grap h) , 贪婪图中的状 态构成的集合成为状态 s 的贪婪封装集(greedy en2 velope) . 状态 s 被激活时 , Checksolved 程序开始 搜索以 s 为根结点的贪婪图 , 寻找是否存在误差大 于ε的状态 s’, 如果不存在误差大于ε的状态 , 则 标记 s 为可解状态且 Checksolved (s) 返回 true , 即 当值函数在状态 s 上收敛时 , 标记 s 为可解. 如果 在状态 s 的贪婪封装集中出现误差大于ε的一个状 态 s’时 , 状态 s 和与其相关的状态都要被更新 , Checksolved (s) 返回 false. Checksolved 的代码在 文献[ 13 ]中的算法 3 中给出 , 状态 s 的标记在程序 中用哈希表的 1 个比特位表示 , 记为 s. solved , 一 个状态 s 被标记为可解当且仅当 s. solved = true. L RTDP 算法通过模拟试验实现 , 除了终止条件不 同 , 它与 RTDP 的试验非常相似. 实验从初始状态 开始 , 以贪婪策略πv 选择动作 , 以相应的转移概率 选择后继状态 , 直到到达一个可解状态时实验结束 (初始时只有目标状态是可解状态) . 每次实验结 束 , 调用标记程序 Checksolved , 反向核对状态的 值函数的值 , 从最后一个不可解状态 ( unsolved) 开 始回溯遍历到 s0 , 直到程序在一些状态上返回 false. 当初始状态 s0 被标记为可解时 , Labeled · 21 · 智 能 系 统 学 报 第 3 卷

第1期 闫书亚,等:概率规划的研究与发展 ·13· RTDP算法终止.LRTDP返回的策略兀,是就状态 到达的不一致的状态进行一个统一的搜索,给试验 s而言的一个偏序最优策略,它只保证了在s和s 中的最后一个未解决(unslo ved)的状态s标记.如 可达的那些状态上策略π,最优,与RTDP一样不 果这样一个状态被找到了,更新它,然后新的试验 需要考虑整个状态空间.LRTDP的代码在文献 被执行,否则,状态s和它所有的未解决的后继被 [13]中的算法4中给出, 标记为可解的,一个新的RTDP循环和标记检查被 实践证明,LRTDP大大地加快了RTDP的收 激活.HDP采用这种方法,但对其进行了改进,它 敛速度.当启发式值h=0时,LRTDP通常也比VI 去掉了标记检查所需要的额外搜索.标记检查作为 收敛速度快.这表明,LRTDP会有一个广泛的应 Find搜索的一部分,它运用Tarjan线性算法o1来 用空间.mGPT规划器2]就将LRTDP作为主要的 检查有向图的强连通分支.在有向图G,中,s与s 算法之一.mGPT利用启发式搜索求解由高层规划 之间的“~”关系为s=s'或s可从s’到达且s'可从 语言PPDDL描述的MDP模型,它支持多种算法 s到达.G中的强连通分支称为等价类,由s与s 和启发式函数,其中最主要的2个算法就是La 之间的“~”定义,并因此形成一个特定的集合,用 beled RTDP和HDp2),mGPT在IPC4中表现突 C表示,并定义当C中的所有s都满足:一致时, 出,下面就来介绍基于HDP的方法 Component C是&一致的,当C中的每一个s都是 2.2.3基于HDP的方法 可解的Component C是可解的.由此定义G:当C Bonet和Geffner在文献[29]中提出了新的启 中某一状态能由C中的某一状态到达时,图的顶点 发式动态规划算法HDP(faster heuristic and dy- 是G中的Components,边是C→C'.显然,Gf是 namic programming search al gorithms for plan- 一个非循环的图.另外: ning),在Tarjan的强连通分支o的基础上,通过 1)状态s是可解的当且仅当Component C是 引入标记机制来对状态进行判断更新 可解的: 文献29J模型化了带有回馈feedback)的非确 2)Component C是可解的当且仅当C是一致 定规划问题,具体说是随机最短路径问题.它首先 的且所有的C'、C→C'是可解的 给出一个一般化的算法框架Find-and-Revise,并给 从而在循环图G,中标记状态的问题可映射到 定e-一致/不一致贪婪图(greedy graph)的定义. 非循环图G中标记Components的问题,而后者 一个值函数v在状态s上是&一致/不一致的是指 则可通过标准的动态规划方法解决。 它在s上的剩余(residual)不大于/大于e:v本身是 HDP算法阐明了存在于HSDP算法背后的 一致的当它在所有的状态上是&一致的,这里的 基本观点:寻找不一致的状态并更新它们,直到不 状态是指在兀下,从sm可以到达的那些状态.贪 存在这样的状态.试验结果显示,与当前的一些算 婪图G,是从初始状态s出发,执行贪婪策略兀得 法相比,HDP还是很有竞争力的 到的图,即0是G,中唯一的根节点,对于G中的 2.2.4基于LDFS的方法 每一非目标状态5,他们的孩子节点是在s上执行 启发式动态规划算法可以有效处理大状态空间 动作π(y可能引起的那些状态. 问题,但这些问题和它们使用的各种技术之间的共 Find-and-Revise通过在贪婪图中搜索不一致 同点往往不是那么清晰.如何将它们转化为更一般 状态并更新它们来计算£-一致值函数,直到不存在 的模型以有效的利用,针对此问题,Bonet和Gef- 不一致的状态.HDP是Find-and-Revise的一个实 fner结合DP算法的优点和HS算法的有效性,发 例化算法,通过Find操作,系统地进行深度优先搜 展了一种通用的算法框架(learning in depth-first 索,并为访问过的状态作标记.一个状态定义为可 search LDFS)B-2],以期达到一般性和有效性」 解的(solved)是指:在s上值函数v是e-一致的, LDFS框架清晰化和一般化了贯穿于各种算法 并且在所有从s出发,经贪婪策略兀能到达的状态 模型中的启发式算法族的2个关键点:学习(learn- 上也是£-一致.当这些条件满足时,在s及从s能 ing)和下界(lower bounds).LDFS结合更新,下界 到达的状态上,不需要进一步进行更新.当初始状 和初始状态知识来为规划问题计算偏序最优策略 态∞是可解的并且因此一个£-一致的值函数找到 (partial optimal policies),它利用这些概念,表示 的时候,算法结束 出一个一般性的框架,这个框架能够覆盖一系列模 由于贪婪图中存在环,HDP采用LRTDPII 型问题 中解决循环的标记方法.在LRTDP中,通过对从s LDFS算法的基本特点是:求解时,结合有界 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net
RTDP 算法终止. L RTDP 返回的策略πv 是就状态 s 而言的一个偏序最优策略 , 它只保证了在 s 和 s 可达的那些状态上策略πv 最优 , 与 RTDP 一样不 需要考虑整个状态空间. L RTDP 的代码在文献 [13 ]中的算法 4 中给出. 实践证明 , L RTDP 大大地加快了 RTDP 的收 敛速度. 当启发式值 h = 0 时 , L RTDP 通常也比 VI 收敛速度快. 这表明 , L RTDP 会有一个广泛的应 用空间. mGPT 规划器[28 ]就将 L RTDP 作为主要的 算法之一. mGPT 利用启发式搜索求解由高层规划 语言 PPDDL 描述的 MDP 模型 , 它支持多种算法 和启发式函数 , 其中最主要的 2 个算法就是 La2 beled RTDP 和 HDP [ 29 ] , mGPT 在 IPC24 中表现突 出 ,下面就来介绍基于 HDP 的方法. 2. 2. 3 基于 HDP 的方法 Bonet 和 Geff ner 在文献[ 29 ]中提出了新的启 发式动态规划算法 HDP (faster heuristic and dy2 namic programming search algorit hms for plan2 ning) , 在 Tarjan 的强连通分支[30 ] 的基础上 , 通过 引入标记机制来对状态进行判断更新. 文献[29 ]模型化了带有回馈 (feedback) 的非确 定规划问题 , 具体说是随机最短路径问题. 它首先 给出一个一般化的算法框架 Find2and2Revise , 并给 定ε2一致/ 不一致贪婪图 ( greedy grap h) 的定义. 一个值函数 v 在状态 s 上是ε2一致/ 不一致的是指 它在 s 上的剩余(residual) 不大于/ 大于ε; v 本身是 ε2一致的当它在所有的状态上是ε2一致的 , 这里的 状态是指在πv 下 , 从 s0 可以到达的那些状态. 贪 婪图 Gv 是从初始状态 s0 出发 , 执行贪婪策略πv 得 到的图 , 即 s0 是 Gv 中唯一的根节点 , 对于 Gv 中的 每一非目标状态 s, 他们的孩子节点是在 s 上执行 动作π(s) 可能引起的那些状态. Find2and2Revise 通过在贪婪图中搜索不一致 状态并更新它们来计算ε2一致值函数 , 直到不存在 不一致的状态. HDP 是 Find2and2Revise 的一个实 例化算法 , 通过 Find 操作 , 系统地进行深度优先搜 索 , 并为访问过的状态作标记. 一个状态定义为可 解的(solved) 是指 : 在 s 上值函数 v 是ε2一致的 , 并且在所有从 s 出发 , 经贪婪策略πv 能到达的状态 上也是ε2一致. 当这些条件满足时 , 在 s 及从 s 能 到达的状态上 , 不需要进一步进行更新. 当初始状 态 s0 是可解的并且因此一个ε2一致的值函数找到 的时候 , 算法结束. 由于贪婪图中存在环 , HDP 采用 L RTDP [ 13 ] 中解决循环的标记方法. 在 LRTDP 中 , 通过对从 s 到达的不一致的状态进行一个统一的搜索 , 给试验 中的最后一个未解决 ( unsloved) 的状态 s 标记. 如 果这样一个状态被找到了 , 更新它 , 然后新的试验 被执行 , 否则 , 状态 s 和它所有的未解决的后继被 标记为可解的 , 一个新的 RTDP 循环和标记检查被 激活. HDP 采用这种方法 , 但对其进行了改进 , 它 去掉了标记检查所需要的额外搜索. 标记检查作为 Find 搜索的一部分 , 它运用 Tarjan 线性算法[30 ] 来 检查有向图的强连通分支. 在有向图 Gv 中 , s 与 s’ 之间的“~”关系为 s = s’或 s 可从 s’到达且 s’可从 s 到达. Gv 中的强连通分支称为等价类 , 由 s 与 s’ 之间的“~”定义 , 并因此形成一个特定的集合 , 用 C表示 , 并定义当 C 中的所有 s 都满足ε2一致时 , Component C 是ε2一致的 ,当 C 中的每一个 s 都是 可解的 Component C 是可解的. 由此定义 G: 当 C’ 中某一状态能由 C 中的某一状态到达时 ,图的顶点 是 Gv 中的 Components, 边是 C →C’. 显然 , G C v 是 一个非循环的图. 另外 : 1) 状态 s 是可解的当且仅当 Component C 是 可解的; 2) Component C 是可解的当且仅当 C 是一致 的且所有的 C’、C →C’是可解的. 从而在循环图 Gv 中标记状态的问题可映射到 非循环图 G C v 中标记 Components 的问题 , 而后者 则可通过标准的动态规划方法解决. HDP 算法阐明了存在于 HS/ DP 算法背后的 基本观点 : 寻找不一致的状态并更新它们 , 直到不 存在这样的状态. 试验结果显示 , 与当前的一些算 法相比 , HDP 还是很有竞争力的. 2. 2. 4 基于 L D FS 的方法 启发式动态规划算法可以有效处理大状态空间 问题 , 但这些问题和它们使用的各种技术之间的共 同点往往不是那么清晰. 如何将它们转化为更一般 的模型以有效的利用 ,针对此问题 , Bonet 和 Gef2 f ner 结合 DP 算法的优点和 HS 算法的有效性 , 发 展了一种通用的算法框架 (learning in dept h2first search ,LDFS) [31232 ] , 以期达到一般性和有效性. LDFS 框架清晰化和一般化了贯穿于各种算法 模型中的启发式算法族的 2 个关键点 : 学习(learn2 ing) 和下界(lower bounds) . LDFS 结合更新 , 下界 和初始状态知识来为规划问题计算偏序最优策略 (partial optimal policies) , 它利用这些概念 , 表示 出一个一般性的框架 , 这个框架能够覆盖一系列模 型问题. LDFS 算法的基本特点是 : 求解时 , 结合有界 第 1 期 闫书亚 ,等 :概率规划的研究与发展 · 31 ·