第4卷第1期 智能系统学报 Vol 4 Na 1 2009年2月 CAA I Transactions on Intelligent Systems Feb 2009 人工心理情感模型的个人机器人 解仑,王志良,余军 化京科技大学信息学院,北京100083) 摘要:以心理动力学中心理能量概念为基础,根据情感能量守恒定律,建立了情感状态能量分布描述空间和情感 状态的概率描述空间,分析情绪状态的变化过程,提出情绪状态自发转移过程的隐马尔可夫链及其模型算法.利用 MATLAB建立相关情感状态变化的仿真研究平台,研究情感状态的变化规律.根据以上人工心理情感模型及其变化 规律构建出个人机器人综合研究平台软,硬件体系结构,并通过该系统的实际运行实验验证了其有效性。 关键词:概率描述空间:自发转移过程:隐马尔可夫链:人工心理情感模型:个人机器人 中图分类号:1P31,TP391文献标识码:A文章编号:1673-4785(2009)01005908 A personal robot based on an affective model of artifical psychology X IE Lun,WANG Zhi-liang,YU Jun (School of Infomaton Engineering.University of Science and Technobgy Beijing,Beijing 100083,China) Abstract:An affective energy distributing model and affective state probability descrip tion pace were set up on the basis of the psycholgical energy of the psycho-dynam ics and affective energy conservation law.The emotional state transferring process and the hidden Markov chain algorithm for self-insp ired transition processes were then studied The personal robot platom,consisting of hardware with a sofware architecture,was based on the affective model of artificial psychology Smulation results and experments on this personal robot platfom showed that the mathe- matical model was an accurate representation of affective state change rules in human be ings They effectively dem- onstrated the validity of the model Keywords:probability descrption space;self-insp ired transitoon process Hidden Markov chain;affective model of artific ial p sychology,personal robot 随着科学技术的进步、经济的发展以及人们的 人),而且还要具有情感、性格、意志、创造等心理活 生活水平的不断提高,机器人已经并将逐步进入生 动情感机器人),甚至还可使其智能及情感行为进 活的方方面面,为每个人提供各种服务,供人娱乐, 行进化进化机器人))在当今的机器人学的研究 能与人进行交流,因此又称之为“个人机器人”正 发展中,赋予机器人情感交互能力己经成为前沿热 像当年人类个人计算机的出现标志着一个崭新时代 点之一 的开启一样,“个人机器人的出现标志着后P℃时 如果想让个人机器人自然地与人交互,就必须赋 代的到来,也会和个人计算机一样,成为人类到处都 予其识别理解、甚至可以拥有和表达人类感情的能 在使用的工具,也可以成为人类的好朋友和好伴侣. 力).作者将以人工智能的理论为基础,以个人机器 所以个人机器人不仅应当具有智能行为智能机器 人相关技术为手段,以研究和建立基于人工心理情感 模型的个人机器人为主要内容,通过仿真计算以及物 收稿日期:2008-10-16 理实现构建个人机器人研究平台,以模拟典型情绪、 基金项目:国家高技术研究计划资助项目(2007AA04218);国家自 然科学基金资助项目(60573059). 情感的变化过程和相应的行为表达模式,从而为个人 通信作者:解仑.Email ygo(@tsinghua edu cn 机器人应用及理论研究提供有意义的帮助, '1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net
第 4卷第 1期 智 能 系 统 学 报 Vol. 4 №. 1 2009年 2月 CAA I Transactions on Intelligent System s Feb. 2009 人工心理情感模型的个人机器人 解 仑 ,王志良 ,余 军 (北京科技大学 信息学院 ,北京 100083) 摘 要 :以心理动力学中心理能量概念为基础 ,根据情感能量守恒定律 ,建立了情感状态能量分布描述空间和情感 状态的概率描述空间 ,分析情绪状态的变化过程 ,提出情绪状态自发转移过程的隐马尔可夫链及其模型算法. 利用 MATLAB建立相关情感状态变化的仿真研究平台 ,研究情感状态的变化规律. 根据以上人工心理情感模型及其变化 规律构建出个人机器人综合研究平台软、硬件体系结构 ,并通过该系统的实际运行实验验证了其有效性. 关键词 :概率描述空间 ;自发转移过程 ;隐马尔可夫链 ;人工心理情感模型 ;个人机器人 中图分类号 : TP31, TP391 文献标识码 : A 文章编号 : 167324785 (2009) 0120059208 A personal robot based on an affective model of artific ial psychology X IE Lun,WANG Zhi2liang, YU Jun ( School of Information Engineering, University of Science and Technology Beijing, Beijing 100083, China) Abstract:An affective energy distributing model and affective state p robability descrip tion space were set up on the basis of the p sychological energy of the p sycho2dynam ics and affective energy conservation law. The emotional state transferring p rocess and the hidden Markov chain algorithm for self2insp ired transition p rocesses were then studied. The personal robot p latform, consisting of hardware with a software architecture, was based on the affective model of artificial p sychology. Simulation results and experiments on this personal robot p latform showed that the mathe2 matical modelwas an accurate rep resentation of affective state change rules in human beings. They effectively dem2 onstrated the validity of the model. Keywords: p robability descrip tion space; self2insp ired transition p rocess; H idden Markov chain; affective model of artificial p sychology; personal robot 收稿日期 : 2008210216. 基金项目 :国家高技术研究计划资助项目 ( 2007AA04Z218) ;国家自 然科学基金资助项目 (60573059). 通信作者 :解 仑. E2mail: ygao@ tsinghua. edu. cn. 随着科学技术的进步、经济的发展以及人们的 生活水平的不断提高 ,机器人已经并将逐步进入生 活的方方面面 ,为每个人提供各种服务 ,供人娱乐 , 能与人进行交流 ,因此又称之为“个人机器人 ”. 正 像当年人类个人计算机的出现标志着一个崭新时代 的开启一样 ,“个人机器人 ”的出现标志着后 PC时 代的到来 ,也会和个人计算机一样 ,成为人类到处都 在使用的工具 ,也可以成为人类的好朋友和好伴侣. 所以个人机器人不仅应当具有智能行为 (智能机器 人 ) ,而且还要具有情感、性格、意志、创造等心理活 动 (情感机器人 ) ,甚至还可使其智能及情感行为进 行进化 (进化机器人 ) [ 1 ] . 在当今的机器人学的研究 发展中 ,赋予机器人情感交互能力已经成为前沿热 点之一. 如果想让个人机器人自然地与人交互,就必须赋 予其识别、理解、甚至可以拥有和表达人类感情的能 力 [ 2 ] . 作者将以人工智能的理论为基础,以个人机器 人相关技术为手段 ,以研究和建立基于人工心理情感 模型的个人机器人为主要内容,通过仿真计算以及物 理实现构建个人机器人研究平台,以模拟典型情绪、 情感的变化过程和相应的行为表达模式 ,从而为个人 机器人应用及理论研究提供有意义的帮助. ' 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net
·60* 智能系统学报 第4卷 Ip …表示初始情绪状态概率分 1情绪状态自发转移过程的隐马尔可 布:p0=[A …及表示n时刻的情绪 夫模型及仿真 状态概率分布.N=3时,设定A的形式为推导过 程省略): 11情感状态的概率空间 a411 412 a 通过人工心理情感模型中情感能量及其状态的 1 a22 数学描述方法,建立起情感状态能量分布描述空间, a432 同时为了统一描述情绪状态的变化情况,把相对情 感能量分布描述空间转换成与之等效的情感状态的 0r-2 概率空间描述方式.从能量分配的角度表达情感能 玩1 量在不同情绪之间的分配比例,可以把看成一种 1 r;-2 1 6) 概率,用p=[,乃,k表示情绪状态概率分布 航 际 际 向量,且=表示在时刻处于情绪的概率 1 1 根据P中各分量的相对大小,亦可确定个体所处的 情绪状态.根据上述观点,情感状态概率空间的定义 式6)中,T=[可 1为A的极限概率, 如下 即mpm=r,表示趋于稳定时的心情状态,可 设基本情绪状态空间集合S=S,S2,…,S}, 用于调节情绪状态自发转移过程的速度 S,=i(i=1,2.,N),N表示基本情绪状态数,随机 13仿真计算 变量X表示情绪状态变量.设P,(i=1,2,…N)为 图I是以上计算过程的仿真曲线,其中图1(a) X=1陬第种情绪状态的概率,且满足 为百=100的仿真图,图1(b)为可=50的仿真图.通 过对比可以看出越大,转移的速度就越慢,体现 P=A1A1…IR=1 了个体情绪状态自发转移变化的速度特征), 0≤P,≤1,i=1,2,N (1) 1.0 称上式为情绪状态概率分布方程.这样,情感状态的 0.8 概率空间模型可表示成 a0.6 S 2) 0.4 P 0.2 12模型的建立 把情绪状态的变化看成是一个随机过程,从而 5101520.253035404550 1/min 可以采用随机过程的理论,进一步研究情绪状的变 (a)F=100的仿真结果 化规律,建立情绪状态的变化规律的数学模型.下面 1.0 简单介绍一下情绪状态自发转移过程的马尔可夫链 0.8 模型和情绪态刺激转移过程的隐马尔可夫模型 (hidden Markov model.HMM) a0.6 P 根据隐马尔可夫链的基本理论,情绪状态自发 0.4 转移过程基本方程可表示为 0.2 pnty ∑Ba,1=1,2,N, (3) 5101520253035404550 t/min ∑B°ag,i=12,N 4) (b)F=50的仿真结果 图1情绪状态自发转移过程仿真曲线 Fig 1 Smulation curves of emotion state self-inspired 其矩阵形式可表示为 transferring process p+W=pA或p=pN (5) 2个人机器人研究平台的构建 其中:A为NW的情绪状态转移矩阵;n为采样时 间序号;1=n(△,△1为采样时间间隔:p= 21硬件体系结构 基于上述人工心理情感模型的个人机器人系统 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.htp://www.cnki.net
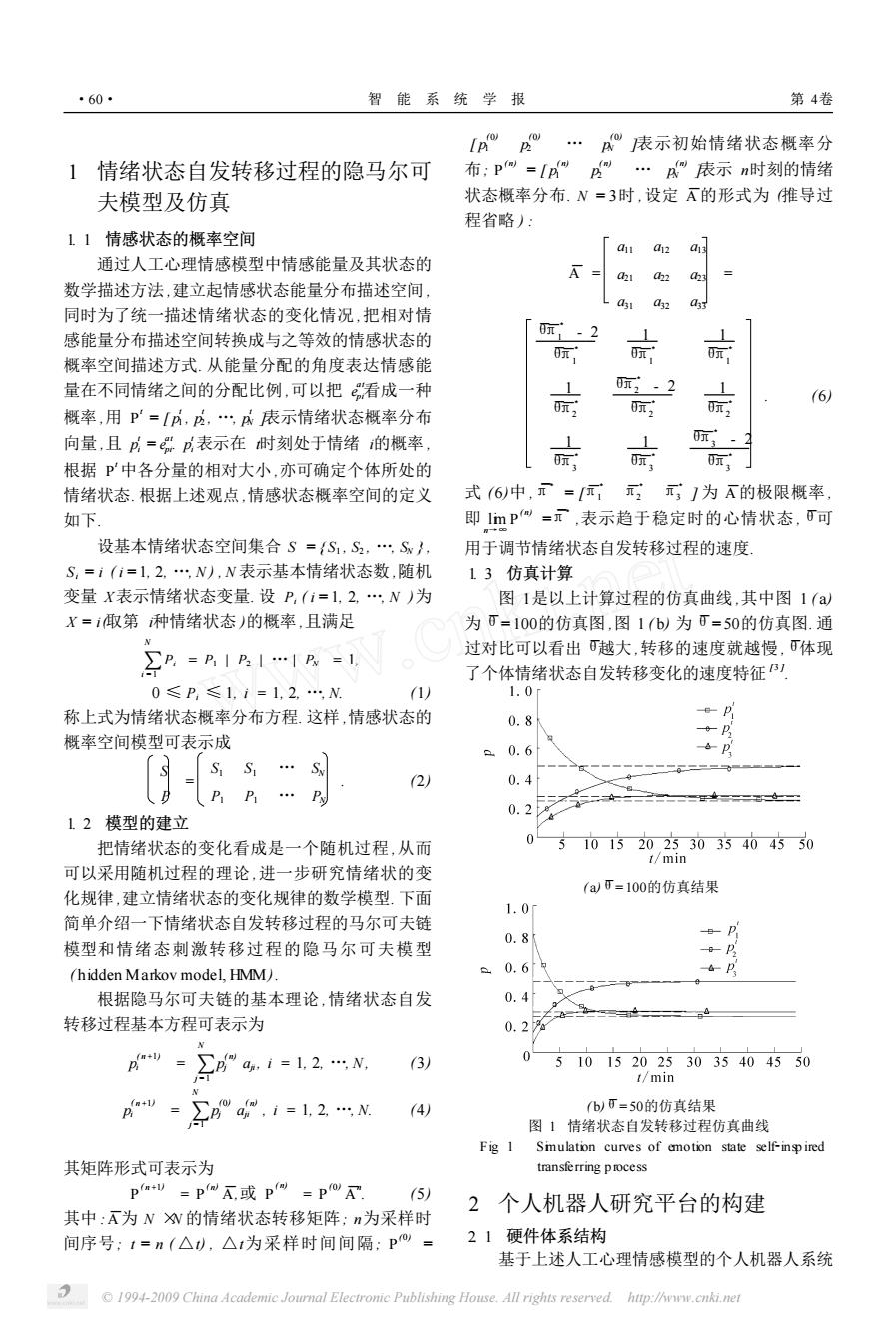
1 情绪状态自发转移过程的隐马尔可 夫模型及仿真 1. 1 情感状态的概率空间 通过人工心理情感模型中情感能量及其状态的 数学描述方法 ,建立起情感状态能量分布描述空间 , 同时为了统一描述情绪状态的变化情况 ,把相对情 感能量分布描述空间转换成与之等效的情感状态的 概率空间描述方式. 从能量分配的角度表达情感能 量在不同情绪之间的分配比例 ,可以把 e a t pi看成一种 概率 ,用 P t = [ p t 1 , p t 2 , …, p t N ]表示情绪状态概率分布 向量 ,且 p t i = e a t pi . p t i 表示在 t时刻处于情绪 i的概率 , 根据 P t 中各分量的相对大小 ,亦可确定个体所处的 情绪状态. 根据上述观点 ,情感状态概率空间的定义 如下. 设基本情绪状态空间集合 S = { S1 , S2 , …, SN }, Si = i ( i = 1, 2, …, N ) , N 表示基本情绪状态数 ,随机 变量 X表示情绪状态变量. 设 Pi ( i = 1, 2, …, N )为 X = i(取第 i种情绪状态 )的概率 ,且满足 ∑ N i =1 Pi = P1 | P2 | … | PN = 1, 0 ≤ Pi ≤ 1, i = 1, 2, …, N. (1) 称上式为情绪状态概率分布方程. 这样 ,情感状态的 概率空间模型可表示成 S P = S1 S1 … SN P1 P1 … PN . (2) 1. 2 模型的建立 把情绪状态的变化看成是一个随机过程 ,从而 可以采用随机过程的理论 ,进一步研究情绪状的变 化规律 ,建立情绪状态的变化规律的数学模型. 下面 简单介绍一下情绪状态自发转移过程的马尔可夫链 模型和情绪态刺激转移过程的隐马尔可夫模型 ( hidden Markov model, HMM). 根据隐马尔可夫链的基本理论 ,情绪状态自发 转移过程基本方程可表示为 p ( n +1) i = ∑ N j=1 p ( n) j aji , i = 1, 2, …, N, (3) p ( n +1) i = ∑ N j=1 p ( 0) j a ( n) ji , i = 1, 2, …, N. (4) 其矩阵形式可表示为 P ( n +1) = P ( n) A,或 P ( n) = P (0) A n . (5) 其中 : A为 N ×N 的情绪状态转移矩阵; n为采样时 间序号; t = n ( △t) , △t为采样时间间隔; P (0) = [ p (0) 1 p (0) 2 … p ( 0) N ]表示初始情绪状态概率分 布; P ( n) = [ p ( n) 1 p ( n) 2 … p ( n) N ]表示 n时刻的情绪 状态概率分布. N = 3时 ,设定 A的形式为 (推导过 程省略 ) : A = a11 a12 a13 a21 a22 a23 a31 a32 a33 = θπ 3 1 - 2 θπ 3 1 1 θπ 3 1 1 θπ 3 1 1 θπ 3 2 θπ 3 2 - 2 θπ 3 2 1 θπ 3 2 1 θπ 3 3 1 θπ 3 3 θπ 3 3 - 2 θπ 3 3 . (6) 式 (6)中 ,π 3 = [π 3 1 π 3 2 π 3 3 ] 为 A的极限概率 , 即 limn→∞ P ( n) =π 3 ,表示趋于稳定时的心情状态 ,θ可 用于调节情绪状态自发转移过程的速度. 1. 3 仿真计算 图 1是以上计算过程的仿真曲线 ,其中图 1 ( a) 为θ = 100的仿真图 ,图 1 ( b) 为θ = 50的仿真图. 通 过对比可以看出 θ越大 ,转移的速度就越慢 ,θ体现 了个体情绪状态自发转移变化的速度特征 [ 3 ] . ( a)θ= 100的仿真结果 ( b)θ = 50的仿真结果 图 1 情绪状态自发转移过程仿真曲线 Fig. 1 Simulation curves of emotion state self2insp ired transferring p rocess 2 个人机器人研究平台的构建 2. 1 硬件体系结构 基于上述人工心理情感模型的个人机器人系统 ·60· 智 能 系 统 学 报 第 4卷 © 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net
第1期 解仑,等:人工心理情感模型的个人机器人 。61 结构复杂,控制对象及功能较多,既有智能控制,又 CAN(controller area netork)总线作为连接各 有情感控制、集中控制和主从控制方式,已不能满足 上下位机之间的通信网络,非常适用于分布式控制 个人机器人对控制系统实时性、开放性、鲁棒性等方 系统.因为它具有以下突出特性:1)CAN控制器工 面的要求.理想的控制系统解决方案是采用分布式 作于多主方式,网络中的各节点都可根据总线访问 控制系统DCS(distributed control system),将控制功 优先权向总线发送数据,通信方式灵活:2)CAN节 能在下位机分散,每个下位机完成一项特定功能,各 点在错误严重的情况下具有自动关闭输出功能,以 下位机便可实现并行工作,这将大大提高整个系统 使总线上其他节点的操作不受影响,因而具有突出 的处理能力和处理速度].DCS的核心思想是集中 的可靠性;3)CAN总线的通信协议可由CAN控制 管理、分散控制,即管理与控制分离,上位机用于集 器芯片及其接口芯片来实现,从而大大降低了系统 中监控和系统管理,下位机分散到现场实现分布式 开发难度,缩短了开发周期;4)CAN总线结构简单, 控制,各上下位机之间通过控制网络互连实现信息 只有两根信号线,挂接在总线上的设备可方便地增 传输.显然,采用DCS方案有如下明显优点:1)实现 减,因而具有优良的可扩展性;5)此外,CAN总线还 集中监控和管理,管理与现场分离,管理更综合化和 有传输速率高、实时性强、开放性好、成本低等特点 系统化:2)实现分散控制,可使各功能模块的设计、 基于CAN总线的分布式控制系统的上位机由 装配、调试、维护独立,系统控制的危险性分散,可靠 主控计算机及语音和图像处理单元构成,下位机则 性提高,投资减小;3)采用网络通信技术,可根据需 是由0一7号节点控制器为核心的功能模块所组成 要增加以微处理器为核心的功能模块,具有良好的 基于人工心理的个人机器人的控制系统硬件结构如 系统开放性、扩展性和升级特性。 图2所示. 远程监摆 无线网 网 电池组 计算机 络接人 主控计算机 双目 图像 采集卡 视觉 传感器 决策层 节点0故诊断华 人 扬声器 音频功放 CAN 电源管理制器 卡 适配器 CAN总线 控制层 节点1:移司 节点2:上肢、 节点3:头部 节点4:音源 节点5: 平台控制器】 腰部运动控制器 运动控制器 方向检测与 传感器信号 功能层 判断控制器 检测控制器 PWM放大器 PWM放大器 PWM 放大器 声音信号 超 编 触 压 处理 红 外 盘 传 模 传感 传 执行层 头部 位置反 感 电机 电机 馈信号 3个麦克风 器 器 感器 图2基于人工心理情感模型的个人机器人的控制系统硬件体系结构 Fig 2 Hardware architecture of personal robot control system based on artificial psychobgy 在该系统中,作为上位机的主控计算机可采用 单元节点是以MCU(本系统选用M icrochip公司的 基于P℃机的高性能的嵌入式计算机,本系统选用 PC系列单片机)为核心的功能模块,各单元CAN GDNE-8310嵌入式主板.PC CAN卡是插在上位机 控制卡从CAN总线接收由上位机传送的数据,解释 扩展槽的CAN总线接口卡,负责PC与CAN总线之 形成驱动各单元的输出信号.当上位机需要各单元 间通信.上位机将控制命令转换成PC CAN卡可识 当前状态信息时,各单元CAN控制卡将状态值经由 别的数据,PC CAN卡收到数据后,按照CAN总线协 CAN总线发至上位机,实现双方数据交换.各单元 议标准发送给系统中各传感执行器,各单元依据标 之间按照CAN总线协议相互通信、协调动作,各节 识符判断是否为自己应处理的数据,若是,则按照相 点平等争用总线,构成具有多主机的冗余总线式网 应算法解释数据内容,控制各单元完成相应动作.各 络拓扑结构 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved hup://www.cnki.net
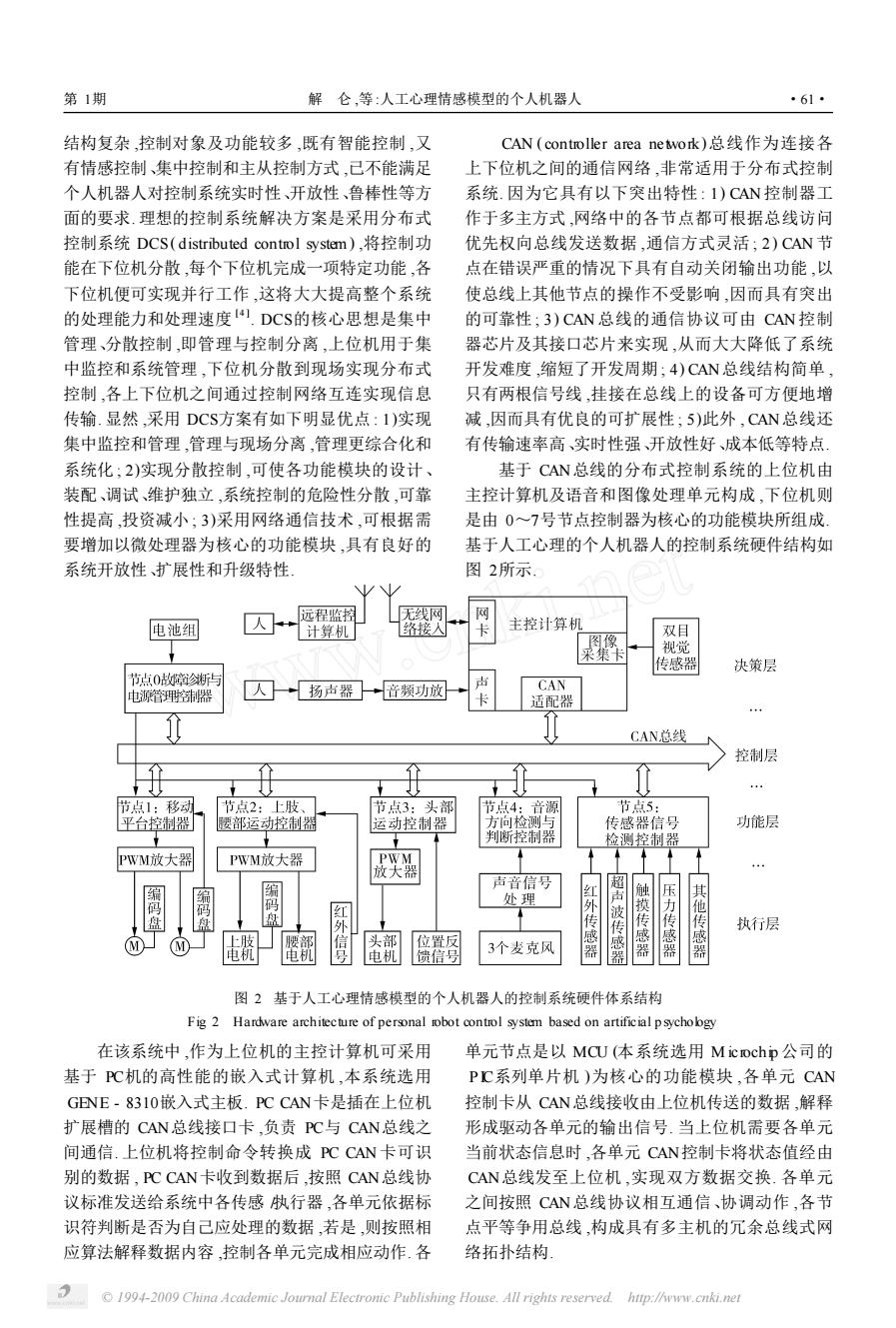
结构复杂 ,控制对象及功能较多 ,既有智能控制 ,又 有情感控制、集中控制和主从控制方式 ,已不能满足 个人机器人对控制系统实时性、开放性、鲁棒性等方 面的要求. 理想的控制系统解决方案是采用分布式 控制系统 DCS( distributed control system) ,将控制功 能在下位机分散 ,每个下位机完成一项特定功能 ,各 下位机便可实现并行工作 ,这将大大提高整个系统 的处理能力和处理速度 [ 4 ] . DCS的核心思想是集中 管理、分散控制 ,即管理与控制分离 ,上位机用于集 中监控和系统管理 ,下位机分散到现场实现分布式 控制 ,各上下位机之间通过控制网络互连实现信息 传输. 显然 ,采用 DCS方案有如下明显优点 : 1)实现 集中监控和管理 ,管理与现场分离 ,管理更综合化和 系统化 ; 2)实现分散控制 ,可使各功能模块的设计、 装配、调试、维护独立 ,系统控制的危险性分散 ,可靠 性提高 ,投资减小 ; 3)采用网络通信技术 ,可根据需 要增加以微处理器为核心的功能模块 ,具有良好的 系统开放性、扩展性和升级特性. CAN ( controller area network)总线作为连接各 上下位机之间的通信网络 ,非常适用于分布式控制 系统. 因为它具有以下突出特性 : 1) CAN控制器工 作于多主方式 ,网络中的各节点都可根据总线访问 优先权向总线发送数据 ,通信方式灵活 ; 2) CAN 节 点在错误严重的情况下具有自动关闭输出功能 ,以 使总线上其他节点的操作不受影响 ,因而具有突出 的可靠性 ; 3) CAN 总线的通信协议可由 CAN 控制 器芯片及其接口芯片来实现 ,从而大大降低了系统 开发难度 ,缩短了开发周期 ; 4) CAN总线结构简单 , 只有两根信号线 ,挂接在总线上的设备可方便地增 减 ,因而具有优良的可扩展性 ; 5)此外 , CAN总线还 有传输速率高、实时性强、开放性好、成本低等特点. 基于 CAN总线的分布式控制系统的上位机由 主控计算机及语音和图像处理单元构成 ,下位机则 是由 0~7号节点控制器为核心的功能模块所组成. 基于人工心理的个人机器人的控制系统硬件结构如 图 2所示. 图 2 基于人工心理情感模型的个人机器人的控制系统硬件体系结构 Fig. 2 Hardware architecture of personal robot control system based on artificial p sychology 在该系统中 ,作为上位机的主控计算机可采用 基于 PC机的高性能的嵌入式计算机 ,本系统选用 GENE - 8310嵌入式主板. PC CAN卡是插在上位机 扩展槽的 CAN总线接口卡 ,负责 PC与 CAN总线之 间通信. 上位机将控制命令转换成 PC CAN卡可识 别的数据 , PC CAN卡收到数据后 ,按照 CAN总线协 议标准发送给系统中各传感 /执行器 ,各单元依据标 识符判断是否为自己应处理的数据 ,若是 ,则按照相 应算法解释数据内容 ,控制各单元完成相应动作. 各 单元节点是以 MCU (本系统选用 M icrochip公司的 PIC系列单片机 )为核心的功能模块 ,各单元 CAN 控制卡从 CAN总线接收由上位机传送的数据 ,解释 形成驱动各单元的输出信号. 当上位机需要各单元 当前状态信息时 ,各单元 CAN控制卡将状态值经由 CAN总线发至上位机 ,实现双方数据交换. 各单元 之间按照 CAN总线协议相互通信、协调动作 ,各节 点平等争用总线 ,构成具有多主机的冗余总线式网 络拓扑结构. 第 1期 解 仑 ,等 :人工心理情感模型的个人机器人 ·61· © 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net
62 智能系统学报 第4卷 系统在纵向结构上可分为4层,如图3所示。 决策层 行为规划层 信息采集 数据库 融合层 红外 上肢 超声 无线 移动 语音 行走 腰部 头部 其他 接触 网络 图像 电机 伺服 伺服 执行 处理 采集 电机 机构 光敏 通信 模块 电机 处理 模块 模块 模块 图3个人机器人控制系统软件体系结构 Fig 3 Sofware architecture of personal robot control system 决策层主要实现以下功能:1)通过无线网络和 机控制直接参与个人机器人的环境感知和运动控 语音处理系统(语音识别与合成)2种方式实现人机 制,是个人机器人完成各项任务和实现各种行为的 交互:2)实现双目视觉图像采集与处理:3)对整个 基础.特别是在未知和不确定动态环境下,高精度运 系统实施管理监控,并对控制层及功能层的事件做 动控制系统是实现避障、路径规划等自主行为的基 出响应 础 控制层检测各节点的工作情况,登记各节点的 23情感状态与情感行为决策 状态,对发生故障的节点进行处理,对系统电源进行 图3除了表示个人机器人智能决策与控制的软 合理的分配和调度 件体系结构以外,还包含情感决策与情感控制的软 功能层由一个基于MCU的节点控制器及相关 件体系结构.根据人工心理情感模型,将图3进一步 电路组成的功能模块所构成,实现机器人的基本行 细化后,可得图4,决策层包括3个部分: 为和感知控制。 1)认知比较器.根据情绪的认知理论,能有这 执行层由环境感知传感器和执行器组成,完成 样的结论:同样的外部环境情感信息,对不同个体或 数据采集和行为动作执行 同一个体,由于不同的心理状态以及所具有的情感 22软件体系结构 经验的不同,其感受到的刺激模式是不同的,进而其 基于人工心理情感模型的个人机器人软件结构 触发的情绪状态也是不同的.刺激模式主要包括媒 采用分层结构,如图3所示.整个控制系统可自上而 介类型、情绪类型以及刺激强度等,媒介类型包括声 下分为:决策层、行为规划层与信息采集融合层.信 音、语音、图像等,情绪类型是指该刺激所引发的情 息采集融合层负责接收来自底层的任务请求以及机 绪类型.心理状态除了包括n、入、Y、a、β等参数的变 器人的当前的运行状态和环境信息,同时将多个传 化以及当前心情状态以外,还包括个体的动机状态, 感器收集的实时环境动态信息进行信息融合,并将 即个体需要系统的静态结构与系统的当前满足状 信息融合的结果送入决策层.决策层根据这些信息 态61 规划出移动机器人所应采取的具体的行为模式,再 认知比较器根据经识别后的外部环境的情感信 向下传递具体的行为指令.行为规划层接收顶层的 息、个体的动机状态以及个体的情感经验(情感 行为控制命令,具体实现机器人自主行动所应采取 知识库),进行综合比较、判断,计算出当前的刺激 的各种行为模式,主要包括移动机器人的路径识别、 模式 实时避障、定点运动、基于音源方向判别的机器人行 2)情绪刺激转移过程计算.根据认知比较器输 为控制以及情绪表达等行为模块.底层传感器和电 出的刺激模式、个体当前的心情状态以及情感性格 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net
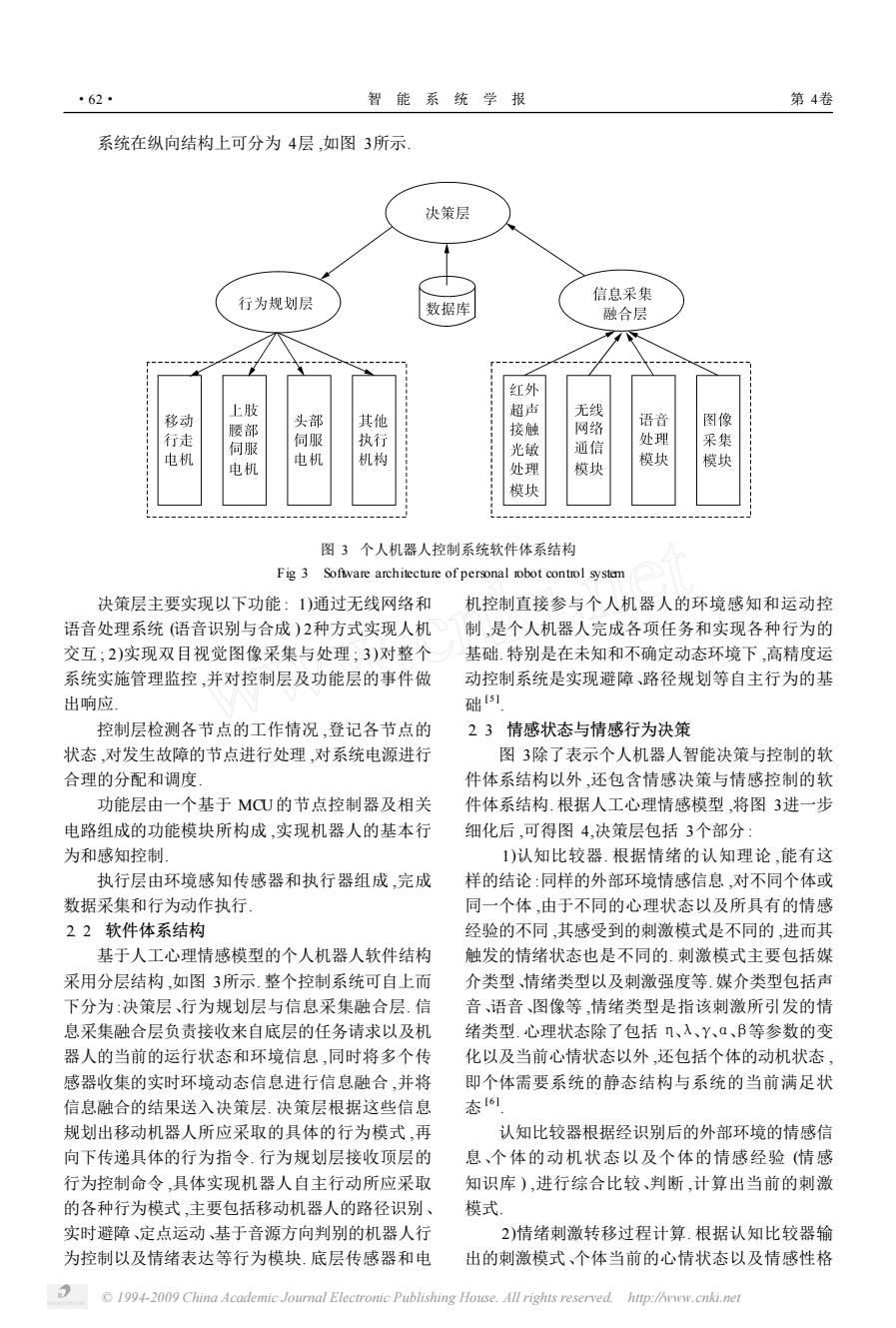
系统在纵向结构上可分为 4层 ,如图 3所示. 图 3 个人机器人控制系统软件体系结构 Fig. 3 Software architecture of personal robot control system 决策层主要实现以下功能 : 1)通过无线网络和 语音处理系统 (语音识别与合成 ) 2种方式实现人机 交互 ; 2)实现双目视觉图像采集与处理 ; 3)对整个 系统实施管理监控 ,并对控制层及功能层的事件做 出响应. 控制层检测各节点的工作情况 ,登记各节点的 状态 ,对发生故障的节点进行处理 ,对系统电源进行 合理的分配和调度. 功能层由一个基于 MCU的节点控制器及相关 电路组成的功能模块所构成 ,实现机器人的基本行 为和感知控制. 执行层由环境感知传感器和执行器组成 ,完成 数据采集和行为动作执行. 2. 2 软件体系结构 基于人工心理情感模型的个人机器人软件结构 采用分层结构 ,如图 3所示. 整个控制系统可自上而 下分为 :决策层、行为规划层与信息采集融合层. 信 息采集融合层负责接收来自底层的任务请求以及机 器人的当前的运行状态和环境信息 ,同时将多个传 感器收集的实时环境动态信息进行信息融合 ,并将 信息融合的结果送入决策层. 决策层根据这些信息 规划出移动机器人所应采取的具体的行为模式 ,再 向下传递具体的行为指令. 行为规划层接收顶层的 行为控制命令 ,具体实现机器人自主行动所应采取 的各种行为模式 ,主要包括移动机器人的路径识别、 实时避障、定点运动、基于音源方向判别的机器人行 为控制以及情绪表达等行为模块. 底层传感器和电 机控制直接参与个人机器人的环境感知和运动控 制 ,是个人机器人完成各项任务和实现各种行为的 基础. 特别是在未知和不确定动态环境下 ,高精度运 动控制系统是实现避障、路径规划等自主行为的基 础 [ 5 ] . 2. 3 情感状态与情感行为决策 图 3除了表示个人机器人智能决策与控制的软 件体系结构以外 ,还包含情感决策与情感控制的软 件体系结构. 根据人工心理情感模型 ,将图 3进一步 细化后 ,可得图 4,决策层包括 3个部分 : 1)认知比较器. 根据情绪的认知理论 ,能有这 样的结论 :同样的外部环境情感信息 ,对不同个体或 同一个体 ,由于不同的心理状态以及所具有的情感 经验的不同 ,其感受到的刺激模式是不同的 ,进而其 触发的情绪状态也是不同的. 刺激模式主要包括媒 介类型、情绪类型以及刺激强度等. 媒介类型包括声 音、语音、图像等 ,情绪类型是指该刺激所引发的情 绪类型. 心理状态除了包括 η、λ、γ、α、β等参数的变 化以及当前心情状态以外 ,还包括个体的动机状态 , 即个体需要系统的静态结构与系统的当前满足状 态 [ 6 ] . 认知比较器根据经识别后的外部环境的情感信 息、个体的动机状态以及个体的情感经验 (情感 知识库 ) ,进行综合比较、判断 ,计算出当前的刺激 模式. 2)情绪刺激转移过程计算. 根据认知比较器输 出的刺激模式、个体当前的心情状态以及情感性格 ·62· 智 能 系 统 学 报 第 4卷 © 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net
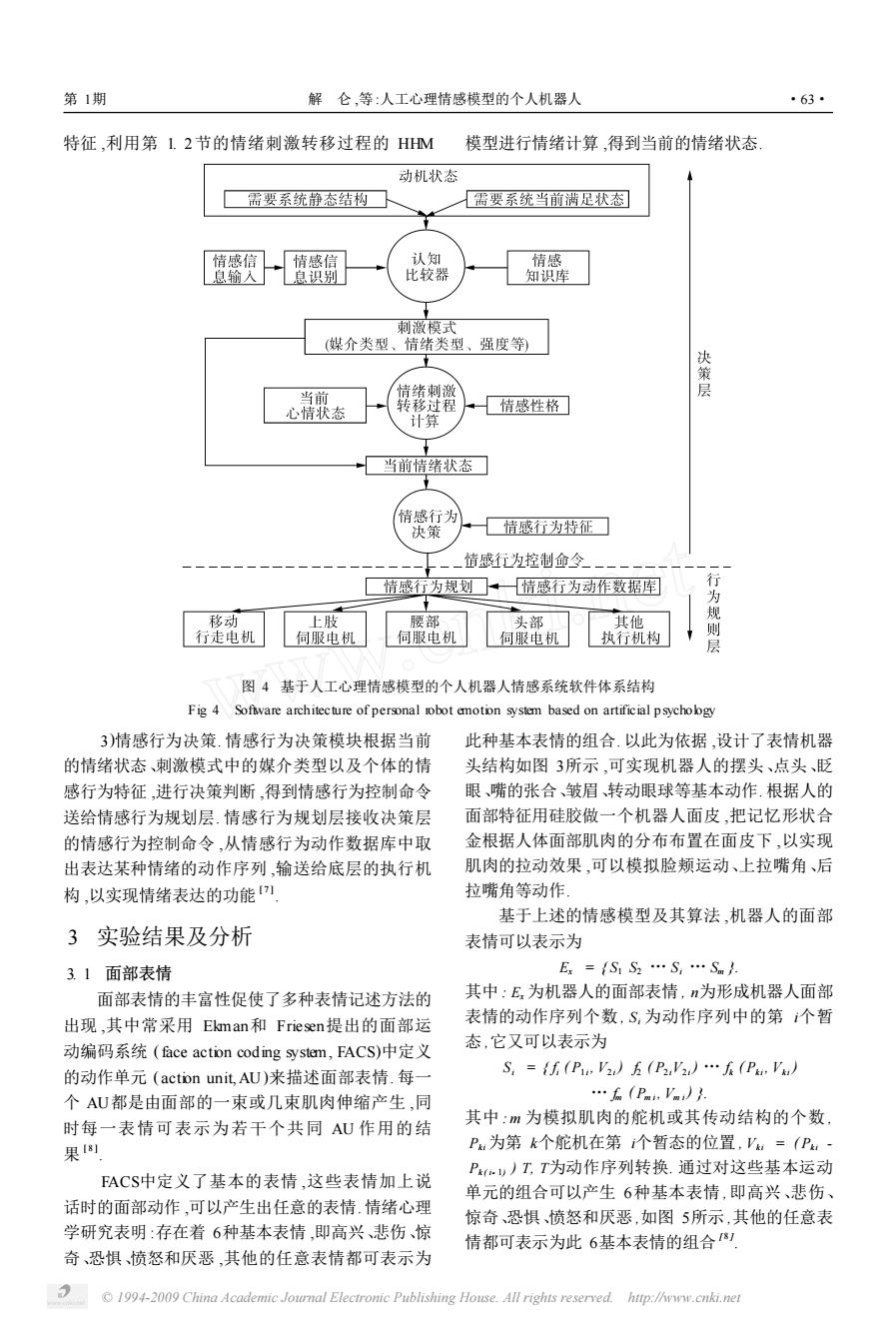
第1期 解仑,等:人工心理情感模型的个人机器人 ·63 特征,利用第1.2节的情绪刺激转移过程的HM 模型进行情绪计算,得到当前的情绪状态, 动机状态 需要系统静态结构 需要系统当前满足状态 情感信 情感信 认知 情感 息输入 息识别 比较器 知识库 刺激模式 (媒介类型、情绪类型、强度等) 决策 当前 情绪刺激 心情状态 转移过程 情感性格 计算 当前情绪状态 情感行为 决策 情感行为特征☐ 情感行为控挝金令 情感行为规划☐情感行为动作数据库 为 移动 上肢 腰部 头部 其他 行走电机 伺服电机 伺服电机 同服电机 执行机构 层 图4基于人工心理情感模型的个人机器人情感系统软件体系结构 Fig 4 Software architecture of personal robot emotion system based on artificial psychobgy 3)情感行为决策.情感行为决策模块根据当前 此种基本表情的组合.以此为依据,设计了表情机器 的情绪状态、刺激模式中的媒介类型以及个体的情 头结构如图3所示,可实现机器人的摆头、点头、眨 感行为特征,进行决策判断,得到情感行为控制命令 眼、嘴的张合、皱眉、转动眼球等基本动作,根据人的 送给情感行为规划层.情感行为规划层接收决策层 面部特征用硅胶做一个机器人面皮,把记忆形状合 的情感行为控制命令,从情感行为动作数据库中取 金根据人体面部肌肉的分布布置在面皮下,以实现 出表达某种情绪的动作序列,输送给底层的执行机 肌肉的拉动效果,可以模拟脸颊运动、上拉嘴角、后 构,以实现情绪表达的功能1 拉嘴角等动作 基于上述的情感模型及其算法,机器人的面部 3实验结果及分析 表情可以表示为 3.1面部表情 Ex=fS1S2…S,…Sm 面部表情的丰富性促使了多种表情记述方法的 其中:E.为机器人的面部表情,n为形成机器人面部 出现,其中常采用Ekman和Friesen提出的面部运 表情的动作序列个数,S为动作序列中的第个暂 动编码系统(face action coding system,FACS)中定义 态,它又可以表示为 的动作单元(action unit,AU)来描述面部表情.每一 S,={f(P,'2)左(P2'2)…东(P,' 个AU都是由面部的一束或几束肌肉伸缩产生,同 …6(Pm,'m)入 时每一表情可表示为若干个共同AU作用的结 其中:m为模拟肌肉的舵机或其传动结构的个数, 果8 Pa为第k个舵机在第个暂态的位置,Va=(Pa- Pk))工,T为动作序列转换.通过对这些基本运动 FACS中定义了基本的表情,这些表情加上说 单元的组合可以产生6种基本表情,即高兴、悲伤、 话时的面部动作,可以产生出任意的表情.情绪心理 惊奇恐惧、愤怒和厌恶,如图5所示,其他的任意表 学研究表明:存在着6种基本表情,即高兴、悲伤、惊 情都可表示为此6基本表情的组合) 奇、恐惧、愤怒和厌恶,其他的任意表情都可表示为 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net
特征 ,利用第 1. 2节的情绪刺激转移过程的 HHM 模型进行情绪计算 ,得到当前的情绪状态. 图 4 基于人工心理情感模型的个人机器人情感系统软件体系结构 Fig. 4 Software architecture of personal robot emotion system based on artificial p sychology 3)情感行为决策. 情感行为决策模块根据当前 的情绪状态、刺激模式中的媒介类型以及个体的情 感行为特征 ,进行决策判断 ,得到情感行为控制命令 送给情感行为规划层. 情感行为规划层接收决策层 的情感行为控制命令 ,从情感行为动作数据库中取 出表达某种情绪的动作序列 ,输送给底层的执行机 构 ,以实现情绪表达的功能 [ 7 ] . 3 实验结果及分析 3. 1 面部表情 面部表情的丰富性促使了多种表情记述方法的 出现 ,其中常采用 Ekman和 Friesen提出的面部运 动编码系统 (face action coding system, FACS)中定义 的动作单元 ( action unit,AU)来描述面部表情. 每一 个 AU都是由面部的一束或几束肌肉伸缩产生 ,同 时每一表情可表示为若干个共同 AU 作用的结 果 [ 8 ] . FACS中定义了基本的表情 ,这些表情加上说 话时的面部动作 ,可以产生出任意的表情. 情绪心理 学研究表明 :存在着 6种基本表情 ,即高兴、悲伤、惊 奇、恐惧、愤怒和厌恶 ,其他的任意表情都可表示为 此种基本表情的组合. 以此为依据 ,设计了表情机器 头结构如图 3所示 ,可实现机器人的摆头、点头、眨 眼、嘴的张合、皱眉、转动眼球等基本动作. 根据人的 面部特征用硅胶做一个机器人面皮 ,把记忆形状合 金根据人体面部肌肉的分布布置在面皮下 ,以实现 肌肉的拉动效果 ,可以模拟脸颊运动、上拉嘴角、后 拉嘴角等动作. 基于上述的情感模型及其算法 ,机器人的面部 表情可以表示为 Ex = { S1 S2 … Si … Sm }. 其中 : Ex 为机器人的面部表情 , n为形成机器人面部 表情的动作序列个数 , Si 为动作序列中的第 i个暂 态 ,它又可以表示为 Si = { fi ( P1 i , V2 i ) f2 ( P2 iV2 i ) … fk ( Pk i , Vk i ) … fm ( Pm i , Vm i ) }. 其中 : m 为模拟肌肉的舵机或其传动结构的个数 , Pk i 为第 k个舵机在第 i个暂态的位置 , Vk i = ( Pk i - Pk ( i- 1) ) T, T为动作序列转换. 通过对这些基本运动 单元的组合可以产生 6种基本表情 ,即高兴、悲伤、 惊奇、恐惧、愤怒和厌恶 ,如图 5所示 ,其他的任意表 情都可表示为此 6基本表情的组合 [ 8 ] . 第 1期 解 仑 ,等 :人工心理情感模型的个人机器人 ·63· © 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net