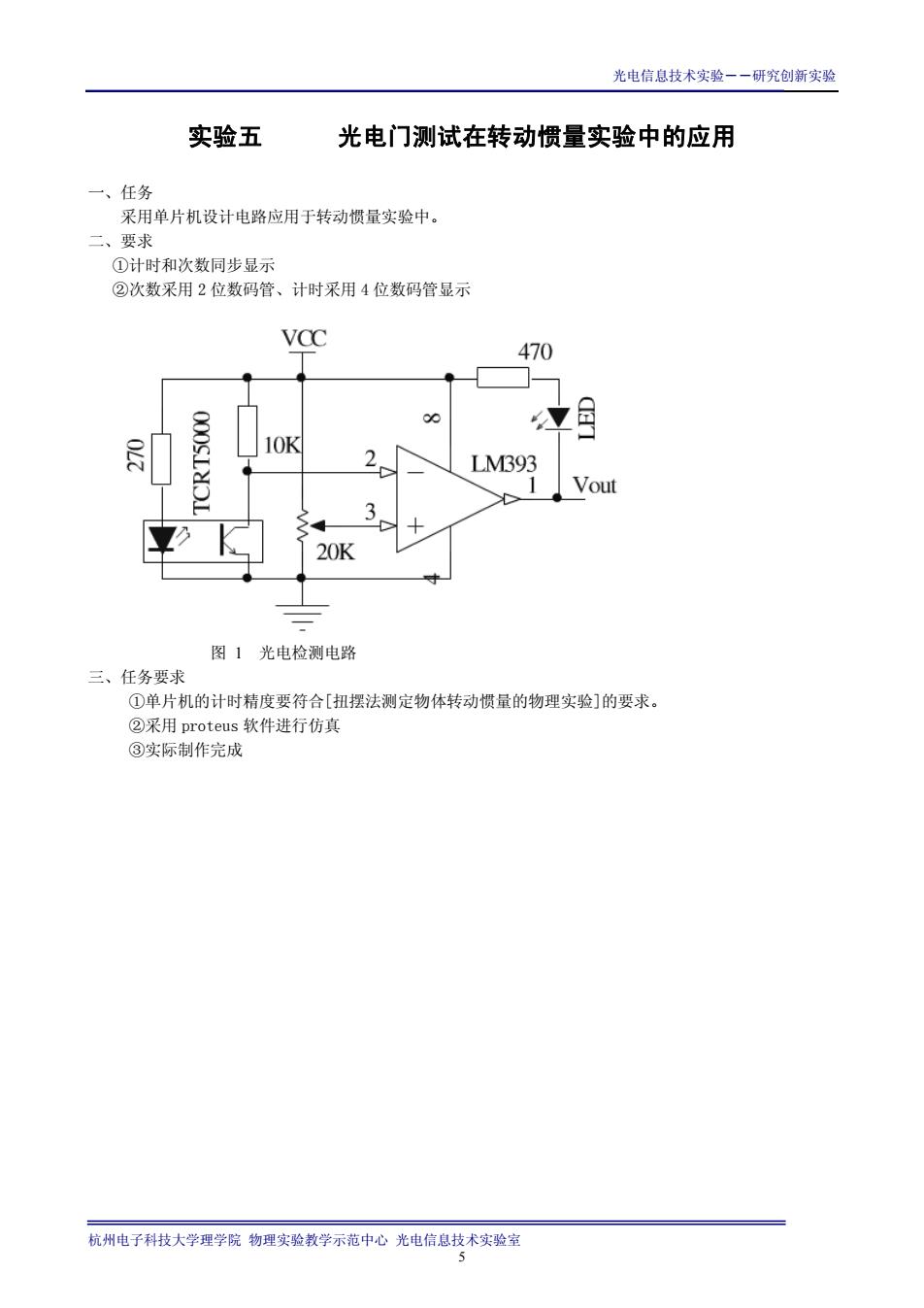
光电信息技术实验一一研究创新实验 实验五 光电门测试在转动惯量实验中的应用 一、任务 采用单片机设计电路应用于转动惯量实验中。 二、 要求 ①计时和次数同步显示 ②次数采用2位数码管、计时采用4位数码管显示 V 470 0/Z 10K LM393 Vout 20K 图1光电检测电路 三、任务要求 ①单片机的计时精度要符合[扭摆法测定物体转动惯量的物理实验]的要求。 ②采用proteus软件进行仿真 ③实际制作完成 杭州电子科技大学理学院物理实验教学示范中心光电信息技术实验
光电信息技术实验――研究创新实验 杭州电子科技大学理学院 物理实验教学示范中心 光电信息技术实验室 5 实验五 光电门测试在转动惯量实验中的应用 一、任务 采用单片机设计电路应用于转动惯量实验中。 二、要求 ①计时和次数同步显示 ②次数采用 2 位数码管、计时采用 4 位数码管显示 图 1 光电检测电路 三、任务要求 ①单片机的计时精度要符合[扭摆法测定物体转动惯量的物理实验]的要求。 ②采用 proteus 软件进行仿真 ③实际制作完成
光电信息技术实验一一研究创新实验 实验六 牛顿环图像处理 “、任务 使用MATLAB图形处理工具箱及GUI技术,设计一个处理牛顿环图像的图形界面程序。 二、要求 1.图像截取 控制CCD摄像头,并对其拍摄图象进行读取: 2.图象处理 对图象进行灰度增强处理 3.图象分析 对获得的图象进行长度定标和长度测量: 4.保存处理结果 生成牛顿环的实验报告并保存。 三、任务要求 ①完成牛顿环图象处理软件的开发: ②掌握MATLAB图象处理工具箱: ③探索该软件如何与生顿环实验装置配合】 四、参考文献 1,《用CCD成像系统观测透射式牛顿环》,物理实验,2005年06期,作者:贺莉蓉等: 2.《MATLAB应用图象处理》,西安电子科技大学出版社,徐飞: 3.《MATLAB GUI设计学习笔记》,北京航空航天大学出版社,罗华飞: 杭州电子科技大学理学院物理实验教学示范中心光电信息技术实验家
光电信息技术实验――研究创新实验 杭州电子科技大学理学院 物理实验教学示范中心 光电信息技术实验室 6 实验六 牛顿环图像处理 一、任务 使用 MATLAB 图形处理工具箱及 GUI 技术,设计一个处理牛顿环图像的图形界面程序。 二、要求 1.图像截取 控制 CCD 摄像头,并对其拍摄图象进行读取; 2.图象处理 对图象进行灰度增强处理; 3.图象分析 对获得的图象进行长度定标和长度测量; 4. 保存处理结果 生成牛顿环的实验报告并保存。 三、任务要求 ①完成牛顿环图象处理软件的开发; ②掌握 MATLAB 图象处理工具箱; ③探索该软件如何与牛顿环实验装置配合。 四、参考文献 1. 《用 CCD 成像系统观测透射式牛顿环》,物理实验,2005 年 06 期,作者:贺莉蓉等; 2. 《MATLAB 应用图象处理》,西安电子科技大学出版社,徐飞; 3. 《MATLAB GUI 设计学习笔记》,北京航空航天大学出版社,罗华飞;
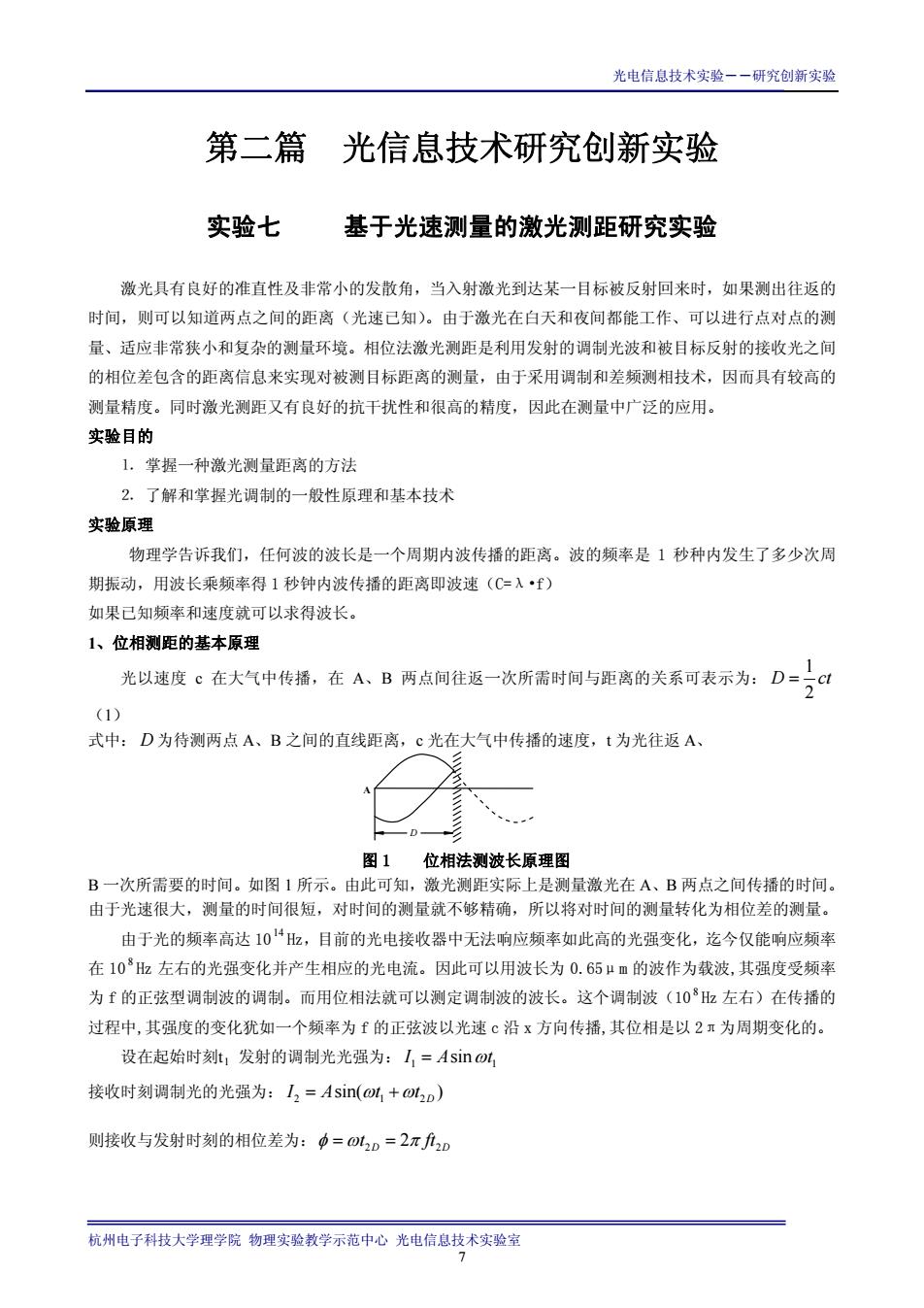
光电信息技术实验一一研究创新实验 第二篇光信息技术研究创新实验 实验七 基于光速测量的激光测距研究实验 激光具有良好的准直性及非常小的发散角,当入射激光到达某一目标被反射回来时,如果测出往返的 时间,则可以知道两点之间的距离(光速已知)。由于激光在白天和夜间都能工作、可以进行点对点的测 量、活应非常狭小和复杂的测量环境。相位法激光测距是利用发射的调制光波和被目标反射的接收光之间 的相位差包含的距离信息来实现对被测目标距高的测量,由于采用调制和差频测相技术,因而具有较高的 测量精度。同时激光测距又有良好的抗干扰性和很高的精度,因此在测量中广泛的应用。 实验目的 1.掌握一种激光测量距离的方法 2.了解和掌握光调制的一般性原理和基本技术 实验原理 物理学告诉我们,任何波的波长是一个周期内波传播的距离。波的频率是1秒种内发生了多少次周 期振动,用波长乘率得1秒钟内波传播的距离即波速(C入·f) 如果已知频率和速度就可以求得波长。 1、位相测距的基本原理 光以速度。在大气中传播,在Λ、B两点间往返一次所需时间与距离的关系可表示为:D=“ (1) 式中:D为待测两点A、B之间的直线距离,©光在大气中传播的速度,t为光往返A 图1 位相法测波长原理图 B一次所需要的时间。如图1所示。由此可知 激光测距实际上是测量激光在A、B两点之间传播的时间 由于光速很大,测量的时间很短,对时间的测量就不够精确,所以将对时间的测量转化为相位差的测量。 由于光的烦率高达10“业,目前的光电接收器中无法响应频率如此高的光强变化,迄今仅能响应频率 在10z左右的光强变化并产生相应的光电流。因此可以用波长为0.65μm的波作为载波,其强度受频率 为『的正弦型调制波的调制。而用位相法就可以测定调制波的波长。这个调制波(10也左右)在传播的 过程中,其强度的变化犹如一个频率为f的正弦波以光速©沿x方向传播,其位相是以2严为周期变化的。 设在起始时刻t,发射的调制光光强为:I1=Asin叫 接收时刻调制光的光强为:2=Asin(o叫+ol2o) 则接收与发射时刻的相位差为:中-2D-2π几2 航州电子科技大学理学院物理实验教学示范中心光电信息技术实验室
光电信息技术实验――研究创新实验 杭州电子科技大学理学院 物理实验教学示范中心 光电信息技术实验室 7 第二篇 光信息技术研究创新实验 实验七 基于光速测量的激光测距研究实验 激光具有良好的准直性及非常小的发散角,当入射激光到达某一目标被反射回来时,如果测出往返的 时间,则可以知道两点之间的距离(光速已知)。由于激光在白天和夜间都能工作、可以进行点对点的测 量、适应非常狭小和复杂的测量环境。相位法激光测距是利用发射的调制光波和被目标反射的接收光之间 的相位差包含的距离信息来实现对被测目标距离的测量,由于采用调制和差频测相技术,因而具有较高的 测量精度。同时激光测距又有良好的抗干扰性和很高的精度,因此在测量中广泛的应用。 实验目的 ⒈ 掌握一种激光测量距离的方法 ⒉ 了解和掌握光调制的一般性原理和基本技术 实验原理 物理学告诉我们,任何波的波长是一个周期内波传播的距离。波的频率是 1 秒种内发生了多少次周 期振动,用波长乘频率得 1 秒钟内波传播的距离即波速(C=λ•f) 如果已知频率和速度就可以求得波长。 1、位相测距的基本原理 光以速度 c 在大气中传播,在 A、B 两点间往返一次所需时间与距离的关系可表示为: 1 2 D c t (1) 式中: 为待测两点 D A、B 之间的直线距离,c 光在大气中传播的速度,t 为光往返 A、 A D 图 1 位相法测波长原理图 B 一次所需要的时间。如图 1 所示。由此可知,激光测距实际上是测量激光在 A、B 两点之间传播的时间。 由于光速很大,测量的时间很短,对时间的测量就不够精确,所以将对时间的测量转化为相位差的测量。 由于光的频率高达 1014 Hz,目前的光电接收器中无法响应频率如此高的光强变化,迄今仅能响应频率 在 10 8 Hz 左右的光强变化并产生相应的光电流。因此可以用波长为 0.65μm 的波作为载波,其强度受频率 为 f 的正弦型调制波的调制。而用位相法就可以测定调制波的波长。这个调制波(10 8 Hz 左右)在传播的 过程中,其强度的变化犹如一个频率为 f 的正弦波以光速 c 沿 x 方向传播,其位相是以 2π为周期变化的。 设在起始时刻t1 发射的调制光光强为: 1 1 I A t sin 接收时刻调制光的光强为: 2 1 sin( ) 2D I A tt 则接收与发射时刻的相位差为: 2 2 2 D D t ft
光电信息技术实验一一研究创新实验 则测量的离班D-名-子0N+兰-N+AWa 式中:无=,N为整波数,△V为不足整被数的尾数,L=号为尺长度。 由测距公式可知,距离是相位差△p的周期变化的多值函数,在[0,π]区间,对应一个尺长,其间D随△p 呈线性变化。而超过一个尺子长度的距离,其相位差就增加2π,即如果测量的距离超过尺长,就会产生 测距值是唯一的。同理当∫=150Mc时,尺长度为L=1米,则在1米之内测距值是唯一的。 一般相位测量的精度是一定的,如用示波器来测相取决于示波器的测量精度。如果测相的精度为 11000,那么尺子越长测量的误差就越大。如1000长的尺子,测距精度为1米,1米长的尺子,则测距精 度为1毫米。因此如果希望有较大的测量距离,又有比较高的测量精度,则就需要设置一组尺子,即长尺 粗测距离,短尺提高测量的精度。而尺子的长短是可以通过改变调制信号的频率来达到。 对于LM20O0A1型光速测量仪,由于他的光信号调制频率是一定的即为10OMHz,因此如果把它来改 为对距离的测量,则测量距离的尺子为15米。 2、差频法测位相 在实际测相过程中,当调制信号的频率不是很高时,如=150:,则可以直接通过测相仪或示波器 进行测量。当信号频率很高时,(∫=1S0M:)测相系统的稳定性、工作速度以及电路分布参量造成的附 加相移等因素都会直接影响测相精度,对电路的制造工艺要求也较苛刻,因此高频下测相困难较大,所以 通常采用差频的办法,即把待测高频信号转化为中、低频信号处理,将两信号之间位相差的测量实际上被 转化为两信号过零的时间差的测量,而降低信号频率f则意味若拉长了与待测的位相差中相对应的时间差。 利用差须检相的方法,将∫=150Mh:(或f=100M)时的高频基准信号和高频被测信号分别与本 机振荡器产生的高频振荡信号混频,得到两个频率为455Kz、位相差依然为中低频信号,然后送到位相计 中(或示波器)去比相。 3、示波器测相 1)双踪示波器法 “出射波”相位信号接至示波器的Y1轴的输入端,“反射波”相位信号接至示波器Y2轴的输入端,调 节“触发”电平,使波形稳定:调节Y轴增益,使有一个适合的波幅:调节“时基”,使在屏上只显示 个完整的波形,并尽可能地展开,如一个波形在X方向展开为10大格,即10大格代表为360°,每1大格 为36°,可以估读至0.1大格,即3.6。 如果示波器无法将一个完整的波形正好调至10大格,此时可以按下式求得出射波参考相位与反射波信 号相位的变化量,参见图2。 航州电子科技大学理学院物理实验教学示范中心光电信息技术实验室
光电信息技术实验――研究创新实验 杭州电子科技大学理学院 物理实验教学示范中心 光电信息技术实验室 8 时间差为: 2 2 D t f 则测量的距离为: 1 1 ( )( 22 2 2 D ct c N L N N) (2) 式中: c f , 为整波数, N N 为不足整波数的尾数, 2 L 为尺长度。 由测距公式可知,距离是相位差 的周期变化的多值函数,在0, 区间,对应一个尺长,其间 D 随 呈线性变化。而超过一个尺子长度的距离,其相位差就增加 2 ,即如果测量的距离超过尺长,就会产生 距离模糊。如调制波的频率为 f =150 khz 时,尺长度 f c 2 L 2 =1000 米,则在 1000 米之内测量距离, 测距值是唯一的。同理当 f =150 Mhz 时,尺长度为 L =1 米,则在 1 米之内测距值是唯一的。 一般相位测量的精度是一定的,如用示波器来测相取决于示波器的测量精度。如果测相的精度为 1/1000,那么尺子越长测量的误差就越大。如 1000 长的尺子,测距精度为 1 米,1 米长的尺子,则测距精 度为 1 毫米。因此如果希望有较大的测量距离,又有比较高的测量精度,则就需要设置一组尺子,即长尺 粗测距离,短尺提高测量的精度。而尺子的长短是可以通过改变调制信号的频率来达到。 对于 LM2000A1 型光速测量仪,由于他的光信号调制频率是一定的即为 100MHz,因此如果把它来改 为对距离的测量,则测量距离的尺子为 1.5 米。 2、差频法测位相 在实际测相过程中,当调制信号的频率不是很高时,如 =150 ,则可以直接通过测相仪或示波器 进行测量。当信号频率很高时,( =150 )测相系统的稳定性、工作速度以及电路分布参量造成的附 加相移等因素都会直接影响测相精度,对电路的制造工艺要求也较苛刻,因此高频下测相困难较大,所以 通常采用差频的办法,即把待测高频信号转化为中、低频信号处理,将两信号之间位相差的测量实际上被 转化为两信号过零的时间差的测量,而降低信号频率 f 则意味着拉长了与待测的位相差φ相对应的时间差。 f khz f Mhz 利用差频检相的方法,将 =150 (或 =100 )时的高频基准信号和高频被测信号分别与本 机振荡器产生的高频振荡信号混频,得到两个频率为 455KHz、位相差依然为φ低频信号,然后送到位相计 中(或示波器)去比相。 f Mhz f Mhz 3、示波器测相 1)双踪示波器法 “出射波”相位信号接至示波器的 Y1 轴的输入端,“反射波”相位信号接至示波器 Y2 轴的输入端,调 节“触发”电平,使波形稳定;调节 Y1 轴增益,使有一个适合的波幅:调节“时基”,使在屏上只显示一 个完整的波形,并尽可能地展开,如一个波形在 X 方向展开为 10 大格,即 10 大格代表为 360º,每 1 大格 为 36º,可以估读至 0.1 大格,即 3.6。 如果示波器无法将一个完整的波形正好调至 10 大格,此时可以按下式求得出射波参考相位与反射波信 号相位的变化量,参见图 2
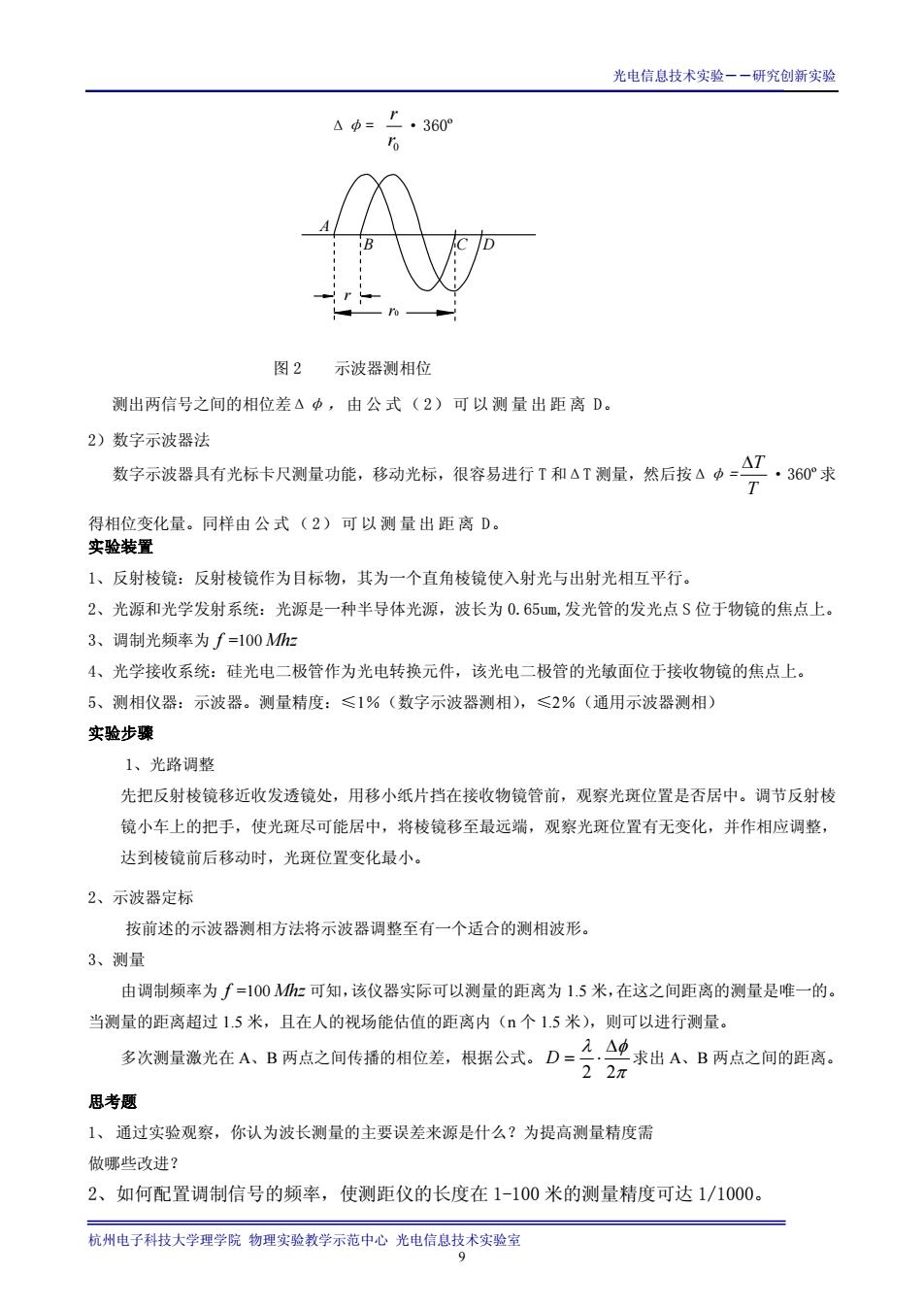
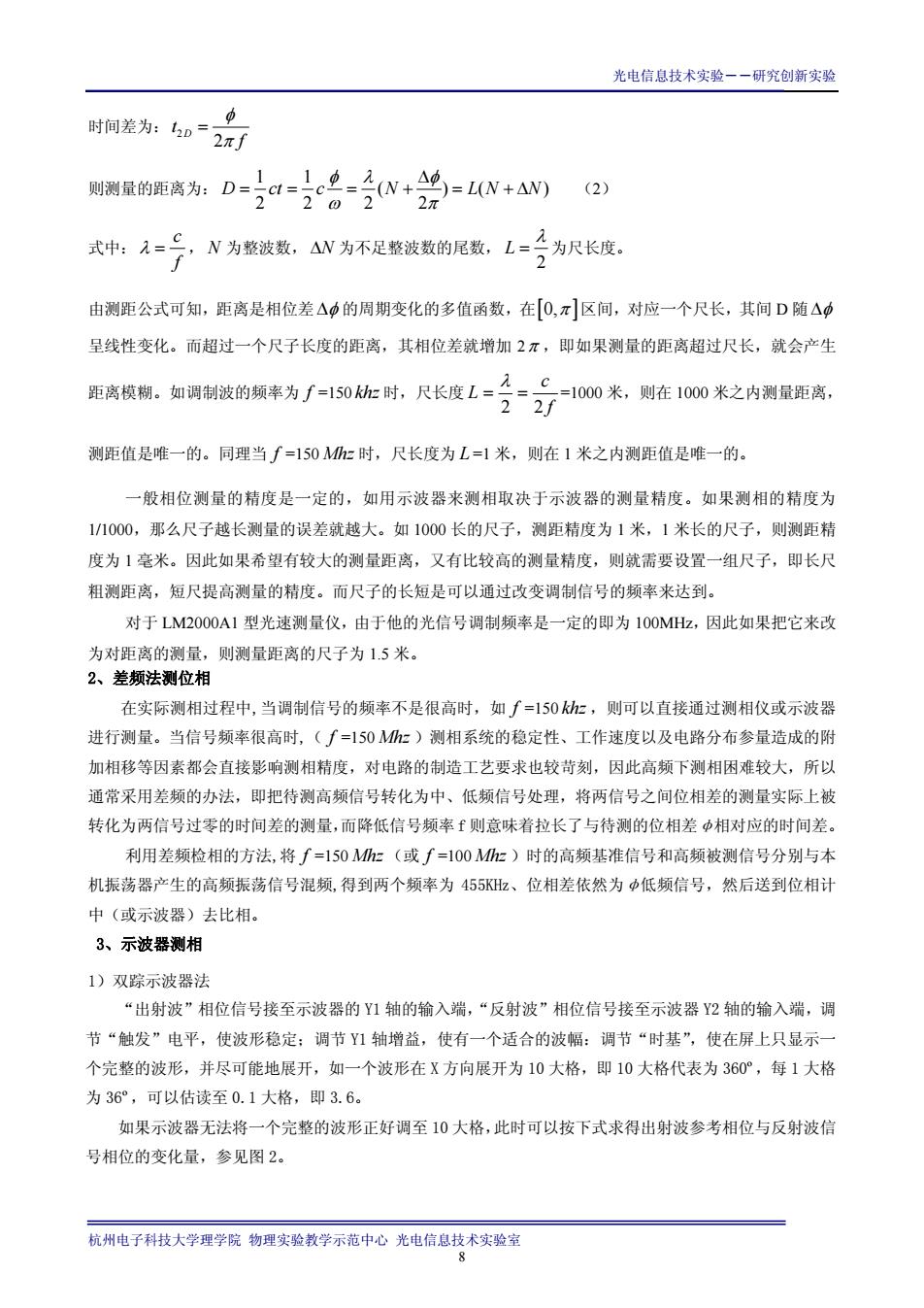
光电信息技术实验一一研究创新实验 图2示波器测相位 测出两信号之间的相位差△中,由公式(2)可以测量出距离D。 2)数字示波器法 数字示被器具有光标卡尺测量功能,移动光标,很容易进行T和△T测量,然后按A中△·360°求 得相位变化量。同样由公式(2)可以测量出距离D。 实验装置 1、反射棱镜:反射棱镜作为目标物,其为一个直角棱镜使入射光与出射光相互平行。 2、光源和光学发射系统:光源是一种半导体光源,波长为0.65um,发光管的发光点S位于物镜的焦点上。 3、调制光频率为f=100Mz 4、光学接收系统:硅光电二极管作为光电转换元件,该光电二极管的光锻面位于接收物镜的焦点上。 5、测相仪器:示波器。测量精度:≤1%(数字示波器测相),≤2%(通用示波器测相) 实验步骤 1、光路调整 先把反射棱镜移近收发透镜处,用移小纸片挡在接收物镜管前,观察光斑位置是否居中。调节反射棱 镜小车上的把手,使光斑尽可能居中,将枝镜移至最远端,观察光斑位置有无变化,并作相应调整, 达到棱镜前后移动时,光斑位置变化最小。 2、示波器定标 按前述的示波器测相方法将示波器调整至有一个适合的测相波形。 3、测量 由调制频率为f=1O0Mhz可知,该仪器实际可以测量的距离为1.5米,在这之间距离的测量是唯一的。 当测量的距离超过1.5米,且在人的视场能估值的距离内(个1.5米),则可以进行测量。 次花在AB两白之作福的险差,限公式。D=专会兰来出人B丙之闲的无离, 思考题 1、通过实验观察,你认为波长测量的主要误差来源是什么?为提高测量精度需 做哪些改进? 2、如何配置调制信号的频率,使测距仪的长度在1-100米的测量精度可达1/1000。 航州电子科技大学理学院物理实验教学示范中心光电信息技术实验
光电信息技术实验――研究创新实验 杭州电子科技大学理学院 物理实验教学示范中心 光电信息技术实验室 9 Δφ = 0r r ·360º A B C D r r0 图 2 示波器测相位 测出两信号之间的相位差Δφ , 由公式(2)可以测量出距离 D。 2)数字示波器法 数字示波器具有光标卡尺测量功能,移动光标,很容易进行 T 和ΔT 测量,然后按Δφ = T T ·360º求 得相位变化量。同样由 公 式 ( 2) 可 以测量出距离 D。 实验装置 1、反射棱镜:反射棱镜作为目标物,其为一个直角棱镜使入射光与出射光相互平行。 2、光源和光学发射系统:光源是一种半导体光源,波长为 0.65um,发光管的发光点 S 位于物镜的焦点上。 3、调制光频率为 f =100 Mhz 4、光学接收系统:硅光电二极管作为光电转换元件,该光电二极管的光敏面位于接收物镜的焦点上。 5、测相仪器:示波器。测量精度:≤1%(数字示波器测相),≤2%(通用示波器测相) 实验步骤 1、光路调整 先把反射棱镜移近收发透镜处,用移小纸片挡在接收物镜管前,观察光斑位置是否居中。调节反射棱 镜小车上的把手,使光斑尽可能居中,将棱镜移至最远端,观察光斑位置有无变化,并作相应调整, 达到棱镜前后移动时,光斑位置变化最小。 2、示波器定标 按前述的示波器测相方法将示波器调整至有一个适合的测相波形。 3、测量 由调制频率为 =100 可知,该仪器实际可以测量的距离为 1.5 米,在这之间距离的测量是唯一的。 当测量的距离超过 1.5 米,且在人的视场能估值的距离内(n 个 1.5 米),则可以进行测量。 f Mhz 多次测量激光在 A、B 两点之间传播的相位差,根据公式。 22 D 求出 A、B 两点之间的距离。 思考题 1、 通过实验观察,你认为波长测量的主要误差来源是什么?为提高测量精度需 做哪些改进? 2、如何配置调制信号的频率,使测距仪的长度在 1-100 米的测量精度可达 1/1000