第1章绪论 a)美国麻省理工学院的RoboTunal6] b)英国埃塞克斯大学的机器鱼1) 图1-5两款电动机驱动的机器鱼 Fig.1-5 Two kinds of motor actuated robot fish 身体 聚合物尾鳍 树脂玻璃罩 柔性躯体 弹性尾鳍 莱卡蒙皮 a)韩国航空大学等的机器蝌蚪24] b)机器七腮鳗26) 图1-6两款智能材料驱动的机器鱼 Fig.1-6 Two kinds of smart material actuated robot fish 美国加州大学伯克利分校研制了锆钛酸铅(PZT)双压电晶片驱动的有缆机 器箱鲀鱼,长22mm,质量1g,可实现尾鳍摆动和胸鳍划动推进。 国内较多单位对身体/尾鳍推进模式的机器鱼进行了研究。北京航空航天 大学是国内开展机器鱼研究最早的单位之一,于1999年研制了模仿银龙鱼波 动游动的机器鳗鱼;于2002、2003和2007年分别研制成功SPC(图1-7(a)、 SPC-Ir29]和SPC-3UUV机器鱼,后者长1.6m,质量46kg,在北戴河长航程 实验中航行了22.761km,平均航速1.03m/s30。 哈尔滨工程大学研制了多款机器鱼,包括以蓝鳍金枪鱼为蓝本的大型机器 鱼“仿生-I号”(图1-7b)B和ICPF驱动的有缆微型机器鱼B2,还进行了 SMA弹簧驱动的关节力学分析和实验研究B。“仿生-I号”长2.4m,1.3Hz 时游速为1.2m/sB4。IPMC驱动的微型机器鱼长50mm,能实现推进和沉浮 动作,1Hz时达最大游速约9.5mm/s。 a)SPC机器鱼3 b)“仿生-I号”机器鱼可 图1-7北京航空航天大学和哈尔滨工程大学的两款大型机器鱼 Fig.1-7 Two kinds of large-scale robot fish developed by Beijing University of Aeronautics and Astronautics and Harbin Engineering University 中科院自动化研究所研制了“游龙”F1-F5系列机器鱼,并于2008年研 制成功带有胸鳍的尾鳍推进机器鱼6]。中国科学技术大学研制了鲹科推进机 -7-
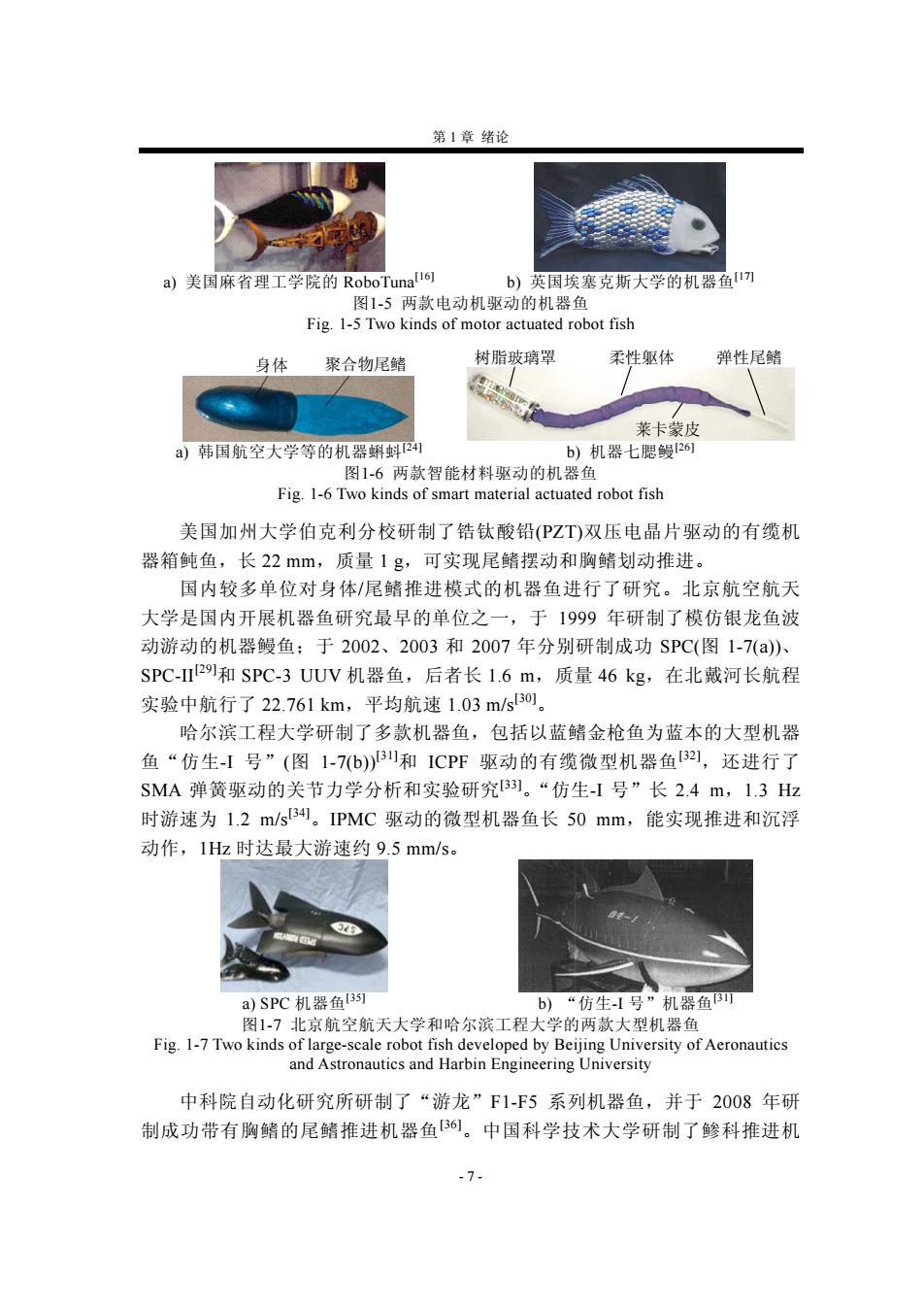
第 1 章 绪论 - 7 - a) 美国麻省理工学院的 RoboTuna[16] b) 英国埃塞克斯大学的机器鱼[17] 图1-5 两款电动机驱动的机器鱼 Fig. 1-5 Two kinds of motor actuated robot fish 身体 聚合物尾鳍 树脂玻璃罩 柔性躯体 弹性尾鳍 莱卡蒙皮 a) 韩国航空大学等的机器蝌蚪[24] b) 机器七腮鳗[26] 图1-6 两款智能材料驱动的机器鱼 Fig. 1-6 Two kinds of smart material actuated robot fish 美国加州大学伯克利分校研制了锆钛酸铅(PZT)双压电晶片驱动的有缆机 器箱鲀鱼,长 22 mm,质量 1 g,可实现尾鳍摆动和胸鳍划动推进。 国内较多单位对身体/尾鳍推进模式的机器鱼进行了研究。北京航空航天 大学是国内开展机器鱼研究最早的单位之一,于 1999 年研制了模仿银龙鱼波 动游动的机器鳗鱼;于 2002、2003 和 2007 年分别研制成功 SPC(图 1-7(a))、 SPC-II[29]和 SPC-3 UUV 机器鱼,后者长 1.6 m,质量 46 kg,在北戴河长航程 实验中航行了 22.761 km,平均航速 1.03 m/s[30]。 哈尔滨工程大学研制了多款机器鱼,包括以蓝鳍金枪鱼为蓝本的大型机器 鱼“仿生-I 号”(图 1-7(b))[31]和 ICPF 驱动的有缆微型机器鱼[32],还进行了 SMA 弹簧驱动的关节力学分析和实验研究[33]。“仿生-I 号”长 2.4 m,1.3 Hz 时游速为 1.2 m/s[34]。IPMC 驱动的微型机器鱼长 50 mm,能实现推进和沉浮 动作,1Hz 时达最大游速约 9.5 mm/s。 a) SPC 机器鱼[35] b) “仿生-I 号”机器鱼[31] 图1-7 北京航空航天大学和哈尔滨工程大学的两款大型机器鱼 Fig. 1-7 Two kinds of large-scale robot fish developed by Beijing University of Aeronautics and Astronautics and Harbin Engineering University 中科院自动化研究所研制了“游龙”F1-F5 系列机器鱼,并于 2008 年研 制成功带有胸鳍的尾鳍推进机器鱼[36]。中国科学技术大学研制了鲹科推进机
哈尔滨工业大学工学博士学位论文 器鱼[B刃,进行了弹性装置提高机器鱼推进效率的研究B8]和SMA弹簧驱动仿鱼 关节的实验39,40。江苏科技大学于2006年研制了由3对胸鳍和1对尾鳍复合 驱动的水下航行器,实现了最大12体长的游动速度4。 哈尔滨工业大学于本世纪初开始了机器鱼的研制,先后研制了软钢丝传动 的仿鱼推进器实验装置42,仿鲹科加新月型尾鳍机器金枪鱼4),“HRF-I”机 器鱼4,以及采用吸排水潜升、可逆向游动的“HRF-Ⅱ”机器鱼4)。 1.2.2.2鳐科模式推进 鳐科模式推进效率较高、稳定性好、机动性高。近年来,各国推出了多种 模拟鳐鱼、乌贼等鳍推进的仿生水下机器人,它们游动时没有侧摇。 爱沙尼亚塔尔图大学于2004年研制了具有一对水平胸鳍的仿鳐鱼机器人 (图1-8(a),游速约5mml/s46。每个胸鳍由8个40mm长的瓶状IPMC致动器 和弹性鳍膜构成。日本理化学研究所和名古屋大学也于2006年研制了由16个 IPMC驱动的微型仿鳐鱼机器人[4,单鳍实验时最大游速18.1mm/s。 新加坡南洋理工大学于2005年开发了电动机驱动的胸鳍波动推进机器墨 鱼48,49),质量约9kg,由分布在身体左右两侧的两个由硬片镶嵌而成的鳍推 进,10个鳍条为上下平动,最大游速20c/s。2006年日本大阪大学研发成功 一种模拟长鳍乌贼鳍波动游动的机器乌贼(图1-8(b)50.5,它采用电动机驱动 刚性鳍条绕着根部做扇形摆动,水平鳍做正弦状波动的游动方式。 2007年,德国气动设备生产商费斯通公司推出了一款液压驱动的、模仿 蝠鲼胸鳍拍动游动的仿生鳐鱼Aqua rayts2,长61.5cm,质量约10kg,采用 了三对水驱动流体肌肉作为致动器,最大游速约1.8km/h。 a)爱沙尼亚塔尔图大学研制的机器人【4] b)日本大阪大学的机器乌贼51 图1-8两款鳐科模式推进仿生水下机器人 Fig.1-8 Two kinds of rajiform-mode propelled biomimetic robots 国内于数年前开始了对水平鳍推进仿生水下机器人的研究。北京航空航天 大学开发了电动机驱动的、两个胸鳍同步动作的机器蝠鲼53.(图1-9()),长 50cm,质量3.8kg,2Hz时游速0.7m/s。浙江大学于2007年研制了电机驱 动仿墨鱼鳍波动推进的仿生鱼探测器(图1-9b),3.5Hz时游速0.25m/s59。 中国科学技术大学利用SMA薄片进行了水平鳍推进研究56,并进行了流体动 -8-
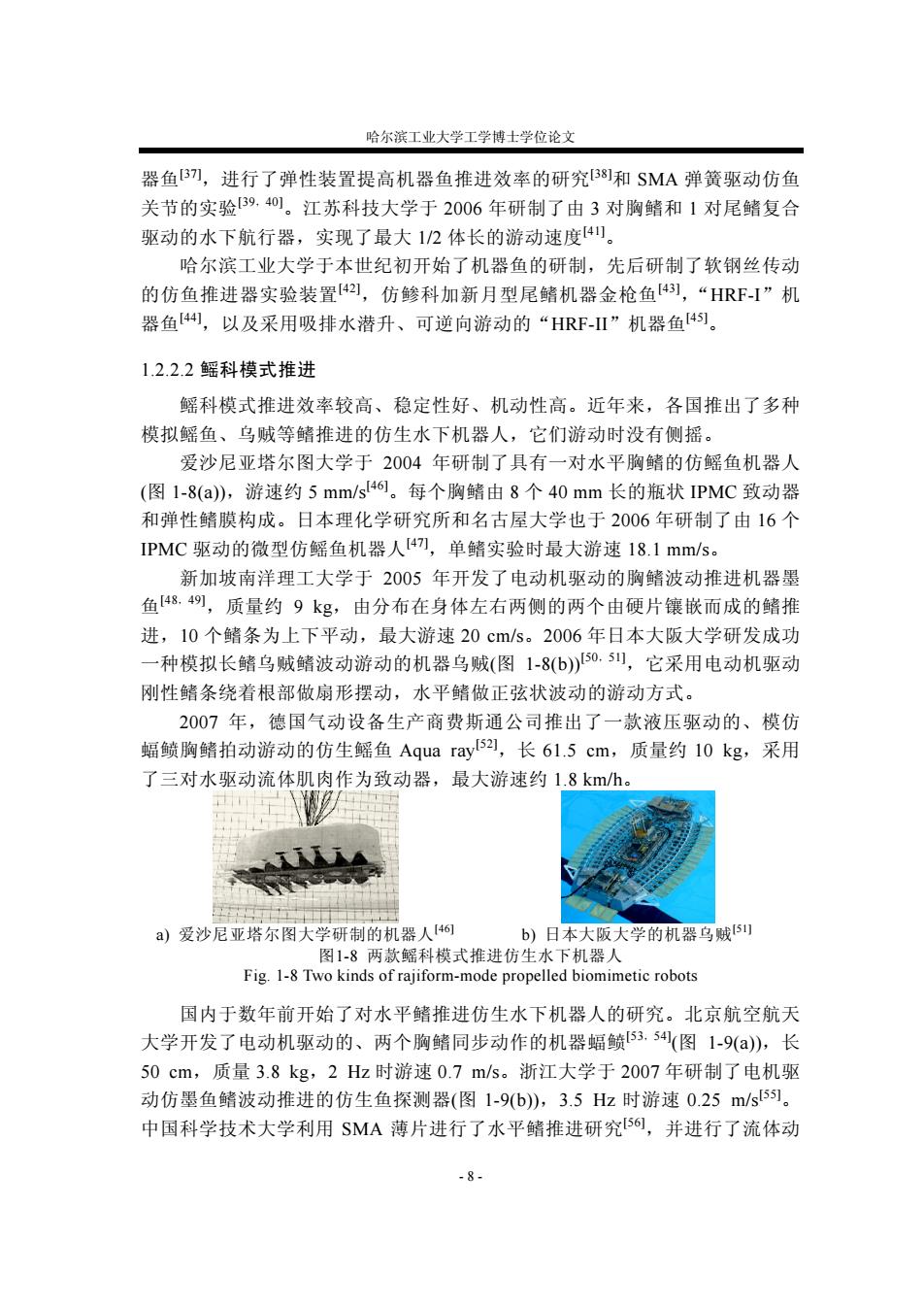
哈尔滨工业大学工学博士学位论文 - 8 - 器鱼[37],进行了弹性装置提高机器鱼推进效率的研究[38]和 SMA 弹簧驱动仿鱼 关节的实验[39,40]。江苏科技大学于 2006 年研制了由 3 对胸鳍和 1 对尾鳍复合 驱动的水下航行器,实现了最大 1/2 体长的游动速度[41]。 哈尔滨工业大学于本世纪初开始了机器鱼的研制,先后研制了软钢丝传动 的仿鱼推进器实验装置[42],仿鲹科加新月型尾鳍机器金枪鱼[43],“HRF-I”机 器鱼[44],以及采用吸排水潜升、可逆向游动的“HRF-II”机器鱼[45]。 1.2.2.2 鳐科模式推进 鳐科模式推进效率较高、稳定性好、机动性高。近年来,各国推出了多种 模拟鳐鱼、乌贼等鳍推进的仿生水下机器人,它们游动时没有侧摇。 爱沙尼亚塔尔图大学于 2004 年研制了具有一对水平胸鳍的仿鳐鱼机器人 (图 1-8(a)),游速约 5 mm/s[46]。每个胸鳍由 8 个 40 mm 长的瓶状 IPMC 致动器 和弹性鳍膜构成。日本理化学研究所和名古屋大学也于 2006 年研制了由 16 个 IPMC 驱动的微型仿鳐鱼机器人[47],单鳍实验时最大游速 18.1 mm/s。 新加坡南洋理工大学于 2005 年开发了电动机驱动的胸鳍波动推进机器墨 鱼[48,49],质量约 9 kg,由分布在身体左右两侧的两个由硬片镶嵌而成的鳍推 进,10 个鳍条为上下平动,最大游速 20 cm/s。2006 年日本大阪大学研发成功 一种模拟长鳍乌贼鳍波动游动的机器乌贼(图 1-8(b))[50,51],它采用电动机驱动 刚性鳍条绕着根部做扇形摆动,水平鳍做正弦状波动的游动方式。 2007 年,德国气动设备生产商费斯通公司推出了一款液压驱动的、模仿 蝠鲼胸鳍拍动游动的仿生鳐鱼 Aqua ray[52],长 61.5 cm,质量约 10 kg,采用 了三对水驱动流体肌肉作为致动器,最大游速约 1.8 km/h。 a) 爱沙尼亚塔尔图大学研制的机器人[46] b) 日本大阪大学的机器乌贼[51] 图1-8 两款鳐科模式推进仿生水下机器人 Fig. 1-8 Two kinds of rajiform-mode propelled biomimetic robots 国内于数年前开始了对水平鳍推进仿生水下机器人的研究。北京航空航天 大学开发了电动机驱动的、两个胸鳍同步动作的机器蝠鲼[53,54](图 1-9(a)),长 50 cm,质量 3.8 kg,2 Hz 时游速 0.7 m/s。浙江大学于 2007 年研制了电机驱 动仿墨鱼鳍波动推进的仿生鱼探测器(图 1-9(b)),3.5 Hz 时游速 0.25 m/s[55]。 中国科学技术大学利用 SMA 薄片进行了水平鳍推进研究[56],并进行了流体动

第1章绪论 力学分析s)。国防科学技术大学利用MSC Dytran对水平鳍摆动推进的鱼类游 动进行了仿真研究58),并研制了质量约1kg的电机驱动“牛鼻鲼-I”号机器 鱼,实现了前进、后退和转弯功能59。 a)北京航空航天大学的机器蝠鲼[54 b)浙江大学的仿鱼探测器5阿 图1-9国内研制的两款鳐科模式推进仿生机器人 Fig.1-9 Two kinds of rajiform-mode propelled biomimetic robots developed by China 1.2.2.3背鳍/臀鳍推进 背鳍/臀鳍推进采用在水下机器人基体背部或臀部、腹部的波动鳍进行推 进,形式上类似于竖直方向的单个水平鳍,机器人游动时没有侧摇。 美国东北大学正在开发的模拟裸背电鳗目辐鳍鱼纲魔鬼刀鱼的臀鳍波动推 进装置(图1-l0(a)6o,鳍由16根鳍条和安装在鳍条上的弹性鳍膜构成。国内 国防科技大学对长背鳍推进的尼罗河魔鬼鱼进行了深入研究,估算了其推力、 功率和效率61,进行了波动鳍理论分析和流体动力学分析6264,并研制了长 400mm的背鳍波动推进器(图1-10(b)及其测控系统65]。 1.2.2.4划动推进 近年来,由于仿生水下机器人低速推进、后退、刹车、位置和姿态调整等 的需求浮出水面,科研人员对划动推进的研究日益增多。 日本东海大学于2000年研制成功的电动机驱动胸鳍划动推进机器鱼Bass Ⅱ,能前后游动、原地转弯以及在水平面内无偏航地侧游66.67)。该大学还研 制了Bass III(图1-1I(a)68和具有2对位置可调胸鳍的PLATYPUS。美国哈佛 大学在详细研究了虹鳟69.0、鲟鱼、豹纹鲨2)、条纹斑竹鲨7)、大口鲈鱼 74、蓝腮太阳鱼75-刀的胸鳍形态、结构、起动、刹车及划动推进流体动力学 后,研制了电机牵线结构的4鳍条胸鳍(图1-11(b)78.9和5鳍条胸鳍80.8, 以及EAP驱动的胸鳍,其中4鳍条胸鳍实现了伸展、弯曲、卷曲,并进行了 1Hz的划动实验82)。美国卡耐基梅隆大学研制了压电陶瓷驱动的、在水上划 动推进的机器水黾83-8),质量约1g,推进速度3cmls,转弯速度0.5rads。 国内中国科学技术大学建立了仿生水下机器人Robo-Mackerel胸鳍划动模 式下游动的物理模型,并分析了机械胸鳍划动的运动学86]。哈尔滨工程大学
第 1 章 绪论 - 9 - 力学分析[57]。国防科学技术大学利用 MSC Dytran 对水平鳍摆动推进的鱼类游 动进行了仿真研究[58],并研制了质量约 1 kg 的电机驱动“牛鼻鲼-I”号机器 鱼,实现了前进、后退和转弯功能[59]。 a) 北京航空航天大学的机器蝠鲼[54] b) 浙江大学的仿鱼探测器[55] 图1-9 国内研制的两款鳐科模式推进仿生机器人 Fig. 1-9 Two kinds of rajiform-mode propelled biomimetic robots developed by China 1.2.2.3 背鳍/臀鳍推进 背鳍/臀鳍推进采用在水下机器人基体背部或臀部、腹部的波动鳍进行推 进,形式上类似于竖直方向的单个水平鳍,机器人游动时没有侧摇。 美国东北大学正在开发的模拟裸背电鳗目辐鳍鱼纲魔鬼刀鱼的臀鳍波动推 进装置(图 1-10(a))[60],鳍由 16 根鳍条和安装在鳍条上的弹性鳍膜构成。国内 国防科技大学对长背鳍推进的尼罗河魔鬼鱼进行了深入研究,估算了其推力、 功率和效率[61],进行了波动鳍理论分析和流体动力学分析[62-64],并研制了长 400 mm 的背鳍波动推进器(图 1-10(b))及其测控系统[65]。 1.2.2.4 划动推进 近年来,由于仿生水下机器人低速推进、后退、刹车、位置和姿态调整等 的需求浮出水面,科研人员对划动推进的研究日益增多。 日本东海大学于 2000 年研制成功的电动机驱动胸鳍划动推进机器鱼 Bass II,能前后游动、原地转弯以及在水平面内无偏航地侧游[66,67]。该大学还研 制了 Bass III(图 1-11(a))[68]和具有 2 对位置可调胸鳍的 PLATYPUS。美国哈佛 大学在详细研究了虹鳟[69,70]、鲟鱼[71]、豹纹鲨[72]、条纹斑竹鲨[73]、大口鲈鱼 [74]、蓝腮太阳鱼[75-77]的胸鳍形态、结构、起动、刹车及划动推进流体动力学 后,研制了电机牵线结构的 4 鳍条胸鳍(图 1-11(b))[78,79]和 5 鳍条胸鳍[80,81], 以及 EAP 驱动的胸鳍,其中 4 鳍条胸鳍实现了伸展、弯曲、卷曲,并进行了 1 Hz 的划动实验[82]。美国卡耐基梅隆大学研制了压电陶瓷驱动的、在水上划 动推进的机器水黾[83-85],质量约 1 g,推进速度 3 cm/s,转弯速度 0.5 rad/s。 国内中国科学技术大学建立了仿生水下机器人 Robo-Mackerel 胸鳍划动模 式下游动的物理模型,并分析了机械胸鳍划动的运动学[86]。哈尔滨工程大学
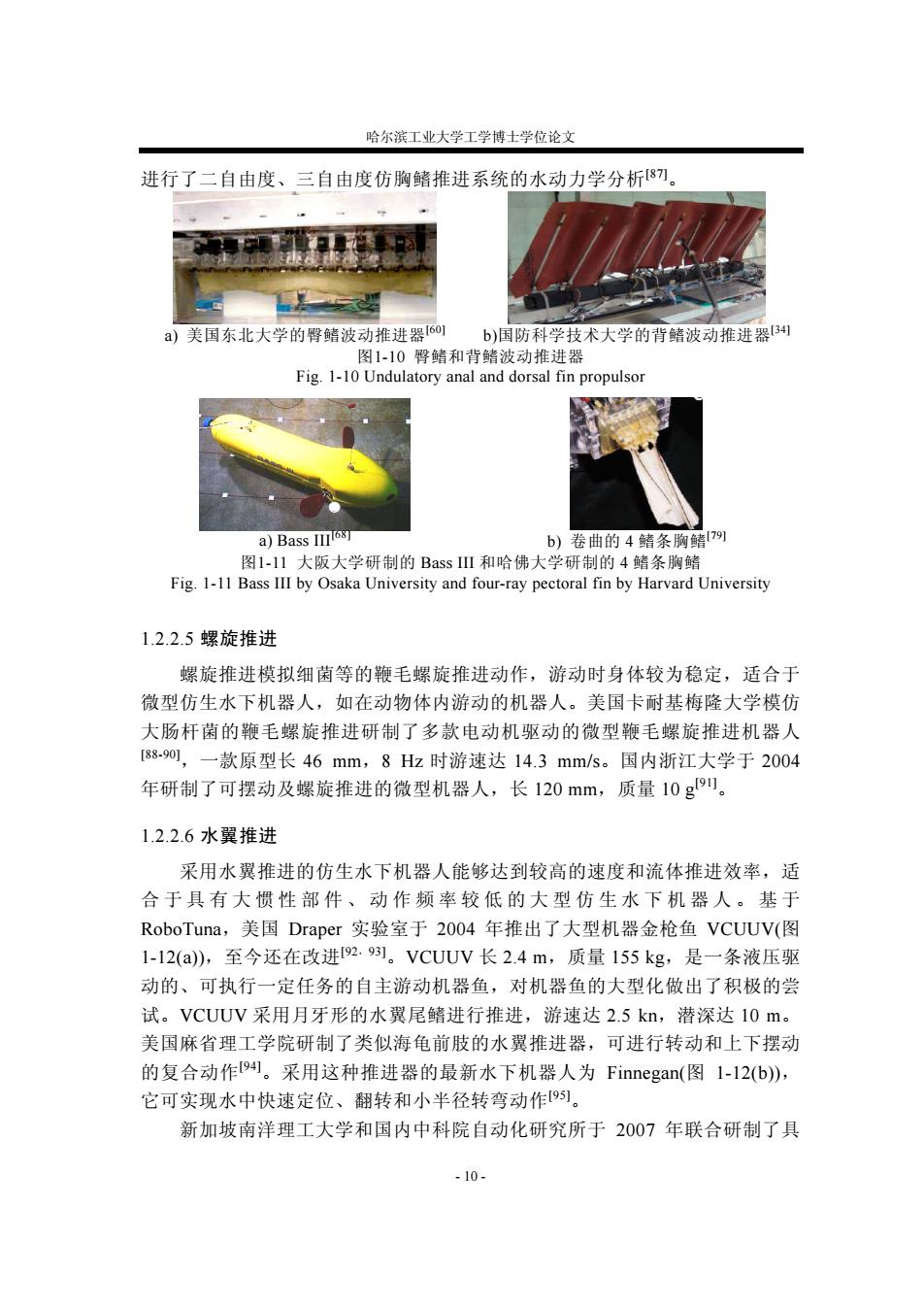
哈尔滨工业大学工学博士学位论文 进行了二自由度、三自由度仿胸鳍推进系统的水动力学分析87。 a)美国东北大学的臀鳍波动推进器6o] b)国防科学技术大学的背鳍波动推进器34 图1-10臀鳍和背鳍波动推进器 Fig.1-10 Undulatory anal and dorsal fin propulsor a)Bass IIIt68T b)卷曲的4鳍条胸鳍79) 图1-11大阪大学研制的BssⅡ和哈佛大学研制的4鳍条胸鳍 Fig.1-11 Bass III by Osaka University and four-ray pectoral fin by Harvard University 1.2.2.5螺旋推进 螺旋推进模拟细菌等的鞭毛螺旋推进动作,游动时身体较为稳定,适合于 微型仿生水下机器人,如在动物体内游动的机器人。美国卡耐基梅隆大学模仿 大肠杆菌的鞭毛螺旋推进研制了多款电动机驱动的微型鞭毛螺旋推进机器人 88-90),一款原型长46mm,8Hz时游速达14.3mms。国内浙江大学于2004 年研制了可摆动及螺旋推进的微型机器人,长120mm,质量10g9。 1.2.2.6水翼推进 采用水翼推进的仿生水下机器人能够达到较高的速度和流体推进效率,适 合于具有大惯性部件、动作频率较低的大型仿生水下机器人。基于 RoboTuna,美国Draper实验室于2004年推出了大型机器金枪鱼VCUUV(图 1-12(a),至今还在改进2.93]。VCUUV长2.4m,质量155kg,是一条液压驱 动的、可执行一定任务的自主游动机器鱼,对机器鱼的大型化做出了积极的尝 试。VCUUV采用月牙形的水翼尾鳍进行推进,游速达2.5kn,潜深达10m。 美国麻省理工学院研制了类似海龟前肢的水翼推进器,可进行转动和上下摆动 的复合动作94)。采用这种推进器的最新水下机器人为Finnegan(图1-l2(b), 它可实现水中快速定位、翻转和小半径转弯动作9]。 新加坡南洋理工大学和国内中科院自动化研究所于2007年联合研制了具 -10-
哈尔滨工业大学工学博士学位论文 - 10 - 进行了二自由度、三自由度仿胸鳍推进系统的水动力学分析[87]。 a) 美国东北大学的臀鳍波动推进器[60] b)国防科学技术大学的背鳍波动推进器[34] 图1-10 臀鳍和背鳍波动推进器 Fig. 1-10 Undulatory anal and dorsal fin propulsor a) Bass III[68] b) 卷曲的 4 鳍条胸鳍[79] 图1-11 大阪大学研制的 Bass III 和哈佛大学研制的 4 鳍条胸鳍 Fig. 1-11 Bass III by Osaka University and four-ray pectoral fin by Harvard University 1.2.2.5 螺旋推进 螺旋推进模拟细菌等的鞭毛螺旋推进动作,游动时身体较为稳定,适合于 微型仿生水下机器人,如在动物体内游动的机器人。美国卡耐基梅隆大学模仿 大肠杆菌的鞭毛螺旋推进研制了多款电动机驱动的微型鞭毛螺旋推进机器人 [88-90],一款原型长 46 mm,8 Hz 时游速达 14.3 mm/s。国内浙江大学于 2004 年研制了可摆动及螺旋推进的微型机器人,长 120 mm,质量 10 g[91]。 1.2.2.6 水翼推进 采用水翼推进的仿生水下机器人能够达到较高的速度和流体推进效率,适 合于具有大惯性部件、动作频率较低的 大型仿生水下机器人。基于 RoboTuna,美国 Draper 实验室于 2004 年推出了大型机器金枪鱼 VCUUV(图 1-12(a)),至今还在改进[92,93]。VCUUV 长 2.4 m,质量 155 kg,是一条液压驱 动的、可执行一定任务的自主游动机器鱼,对机器鱼的大型化做出了积极的尝 试。VCUUV 采用月牙形的水翼尾鳍进行推进,游速达 2.5 kn,潜深达 10 m。 美国麻省理工学院研制了类似海龟前肢的水翼推进器,可进行转动和上下摆动 的复合动作[94]。采用这种推进器的最新水下机器人为 Finnegan(图 1-12(b)), 它可实现水中快速定位、翻转和小半径转弯动作[95]。 新加坡南洋理工大学和国内中科院自动化研究所于 2007 年联合研制了具

第1章绪论 有水翼前肢和后肢的机器海龟,可实现水翼推进96]。国内哈尔滨工程大学研 究了海龟前肢水翼和后肢璞足的游动动作,于2007年开始研制了仿生水翼和 仿生璞足,并已进行了仿生水翼的动作实验97,981。 a)美国Draper实验室的VCUUV9] b)美国麻省理工学院的Finnegan9] 图1-12两款水翼推进的仿生水下机器人 Fig.1-12 Two kinds of hydrofoil propelled biomimetic UVs 1.2.2.7喷射推进 喷射推进的柔性动作较难模仿,且电动机难以适用,因此相应的仿生水下 机器人种类较少。韩国智能系统设计与控制实验室研制了初始形状为弯曲状态 的PMC致动器,并基于这种致动器研发了模拟海月水母的机器水母,该机器 水母能模拟水母的收缩一扩张的喷射动作。国内哈尔滨工程大学研制的机 器水母1o.1o1,宽36mm,在橡胶半球开口处内嵌SMA丝以收缩半球实现推 进,四个IPMC片可用于行走。这两款机器水母实现了游动,但并未真正模拟 水母的静水骨骼(Hydrostatic Skeleton),与水母的动作还有较大的差距。 1.2.3游动仿生水下机器人推进装置的发展趋势 从大类上来讲,水中动物游动方式都己被仿生水下机器人模拟,但现有仿 生推进系统在结构、效率、控制性能、灵活性等方面,与动物差距还较大。在 推进方式方面,游动仿生水下机器人具有如下发展趋势。 1.2.3.1游动推进方式模拟深入化 动物的推进方式各有优缺点,根据所需目标来选择合适的推进方式是明智 的做法。现有仿生推进方式还很初级,远未达到动物推进部件的水平。所以, 深入研究各种游动方式能进一步改善仿生水下机器人的游动性能。 1.2.3.2致动器智能化 游动仿生水下机器人诞生以来,电动机一直占据致动器的主导地位,但其 问题是体积大、质量大、需传动装置、存在较大噪音,其驱动的结构惯性大、 结构复杂,不利于仿生机器人的大型化和微型化。由于与动物肌肉具有相似 -11-
第 1 章 绪论 - 11 - 有水翼前肢和后肢的机器海龟,可实现水翼推进[96]。国内哈尔滨工程大学研 究了海龟前肢水翼和后肢蹼足的游动动作,于 2007 年开始研制了仿生水翼和 仿生蹼足,并已进行了仿生水翼的动作实验[97,98]。 a) 美国 Draper 实验室的 VCUUV[93] b) 美国麻省理工学院的 Finnegan[95] 图1-12 两款水翼推进的仿生水下机器人 Fig. 1-12 Two kinds of hydrofoil propelled biomimetic UVs 1.2.2.7 喷射推进 喷射推进的柔性动作较难模仿,且电动机难以适用,因此相应的仿生水下 机器人种类较少。韩国智能系统设计与控制实验室研制了初始形状为弯曲状态 的 IPMC 致动器,并基于这种致动器研发了模拟海月水母的机器水母,该机器 水母能模拟水母的收缩—扩张的喷射动作[99]。国内哈尔滨工程大学研制的机 器水母[100,101],宽 36 mm,在橡胶半球开口处内嵌 SMA 丝以收缩半球实现推 进,四个 IPMC 片可用于行走。这两款机器水母实现了游动,但并未真正模拟 水母的静水骨骼(Hydrostatic Skeleton),与水母的动作还有较大的差距。 1.2.3 游动仿生水下机器人推进装置的发展趋势 从大类上来讲,水中动物游动方式都已被仿生水下机器人模拟,但现有仿 生推进系统在结构、效率、控制性能、灵活性等方面,与动物差距还较大。在 推进方式方面,游动仿生水下机器人具有如下发展趋势。 1.2.3.1 游动推进方式模拟深入化 动物的推进方式各有优缺点,根据所需目标来选择合适的推进方式是明智 的做法。现有仿生推进方式还很初级,远未达到动物推进部件的水平。所以, 深入研究各种游动方式能进一步改善仿生水下机器人的游动性能。 1.2.3.2 致动器智能化 游动仿生水下机器人诞生以来,电动机一直占据致动器的主导地位,但其 问题是体积大、质量大、需传动装置、存在较大噪音,其驱动的结构惯性大、 结构复杂,不利于仿生机器人的大型化和微型化。由于与动物肌肉具有相似