哈尔滨工业大学工学博士学位论文 有高性能的耐压壳和浮力材料,以承受巨大的压力,保护部件,并提供所需的 浮力。耐压壳越大,制造难度就越大。巨大的压力阻碍了人类探索深海的脚 步。然而人们发现,在深海甚至万米深渊,也有生物存在,如俗称吸血鬼乌贼 的幽灵蛸(Vampyroteuthis infernalis),就生活在600-3000m深的海域。深海 生物能在深海中生存,其中两个重要原因为:(1)它们体内没有充气结构,身 体结构能耐高压;(2)它们身体密度与海水非常接近,这使它们只需消耗极小 能量即可使自身保持悬浮的状态,有利于节省能量。有些海洋生物如乳光枪乌 贼(Loligo opalescens)),白天潜伏在500m左右深的海底,晚上到浅海觅食, 其耐压能力得益于没有充气结构的肌肉性静水骨骼(Muscular hydrostat)。 人们对鱼类、乌贼等具有杰出游动能力的水下生物的游动机理研究己有数 十年,取得了较大进展,但生物体是不能按照研究者的意愿游动的,这限制了 实验的开展。若能制造模拟生物体游动动作的仿生机器人并将其按照研究者的 意愿游动,则有希望帮助研究者解开生物游动中的未解之谜。 由上可见,若能借鉴海洋生物的耐压机制,如肌肉性静水骨骼,并模仿乌 贼等高效的游动方式,则将创造出新型的、具有较高耐压能力和能高效游动的 仿生水下机器人,它还可反过来协助研究动物的游动机理。 本章结合本文的研究背景和内容,首先介绍游动仿生水下机器人推进方式 的研究现状和发展趋势,然后介绍静水骨骼/肌肉性静水骨骼及基于其原理的 机器人的发展概况,再论述各种智能材料的发展概况及其在仿生机器人领域的 应用,最后介绍课题的来源、意义和主要研究内容。 1.2游动仿生水下机器人研究概述 仿生水下机器人按照运动形式,可分为游动仿生水下机器人和爬行仿生水 下机器人。游动仿生水下机器人模拟鱼、乌贼等的游动。爬行水下机器人模拟 螃蟹、龙虾等的爬行。对于游动仿生水下机器人来说,游动是其最基本的功 能,也是决定其流体推进效率、能量利用效率和机动性的关键,因此是科研人 员关注较多的方面。下面先对动物水中推进方式进行分类,然后依照游动方式 介绍游动仿生水下机器人的国内外研究现状,并论述其发展趋势。 1.2.1动物水中推进方式分类 效率和速度并不一定是动物水中推进追求的首选目标,动物的推进与其生 活环境相适应,是运动能力、生活习性与现实环境的折衷。动物在水中推进, -2
哈尔滨工业大学工学博士学位论文 - 2 - 有高性能的耐压壳和浮力材料,以承受巨大的压力,保护部件,并提供所需的 浮力。耐压壳越大,制造难度就越大。巨大的压力阻碍了人类探索深海的脚 步。然而人们发现,在深海甚至万米深渊,也有生物存在,如俗称吸血鬼乌贼 的幽灵蛸(Vampyroteuthis infernalis),就生活在 600-3000 m 深的海域[5]。深海 生物能在深海中生存,其中两个重要原因为:(1)它们体内没有充气结构,身 体结构能耐高压;(2)它们身体密度与海水非常接近,这使它们只需消耗极小 能量即可使自身保持悬浮的状态,有利于节省能量。有些海洋生物如乳光枪乌 贼(Loligo opalescens),白天潜伏在 500 m 左右深的海底,晚上到浅海觅食, 其耐压能力得益于没有充气结构的肌肉性静水骨骼(Muscular hydrostat)。 人们对鱼类、乌贼等具有杰出游动能力的水下生物的游动机理研究已有数 十年,取得了较大进展,但生物体是不能按照研究者的意愿游动的,这限制了 实验的开展。若能制造模拟生物体游动动作的仿生机器人并将其按照研究者的 意愿游动,则有希望帮助研究者解开生物游动中的未解之谜。 由上可见,若能借鉴海洋生物的耐压机制,如肌肉性静水骨骼,并模仿乌 贼等高效的游动方式,则将创造出新型的、具有较高耐压能力和能高效游动的 仿生水下机器人,它还可反过来协助研究动物的游动机理。 本章结合本文的研究背景和内容,首先介绍游动仿生水下机器人推进方式 的研究现状和发展趋势,然后介绍静水骨骼/肌肉性静水骨骼及基于其原理的 机器人的发展概况,再论述各种智能材料的发展概况及其在仿生机器人领域的 应用,最后介绍课题的来源、意义和主要研究内容。 1.2 游动仿生水下机器人研究概述 仿生水下机器人按照运动形式,可分为游动仿生水下机器人和爬行仿生水 下机器人。游动仿生水下机器人模拟鱼、乌贼等的游动。爬行水下机器人模拟 螃蟹、龙虾等的爬行。对于游动仿生水下机器人来说,游动是其最基本的功 能,也是决定其流体推进效率、能量利用效率和机动性的关键,因此是科研人 员关注较多的方面。下面先对动物水中推进方式进行分类,然后依照游动方式 介绍游动仿生水下机器人的国内外研究现状,并论述其发展趋势。 1.2.1 动物水中推进方式分类 效率和速度并不一定是动物水中推进追求的首选目标,动物的推进与其生 活环境相适应,是运动能力、生活习性与现实环境的折衷。动物在水中推进
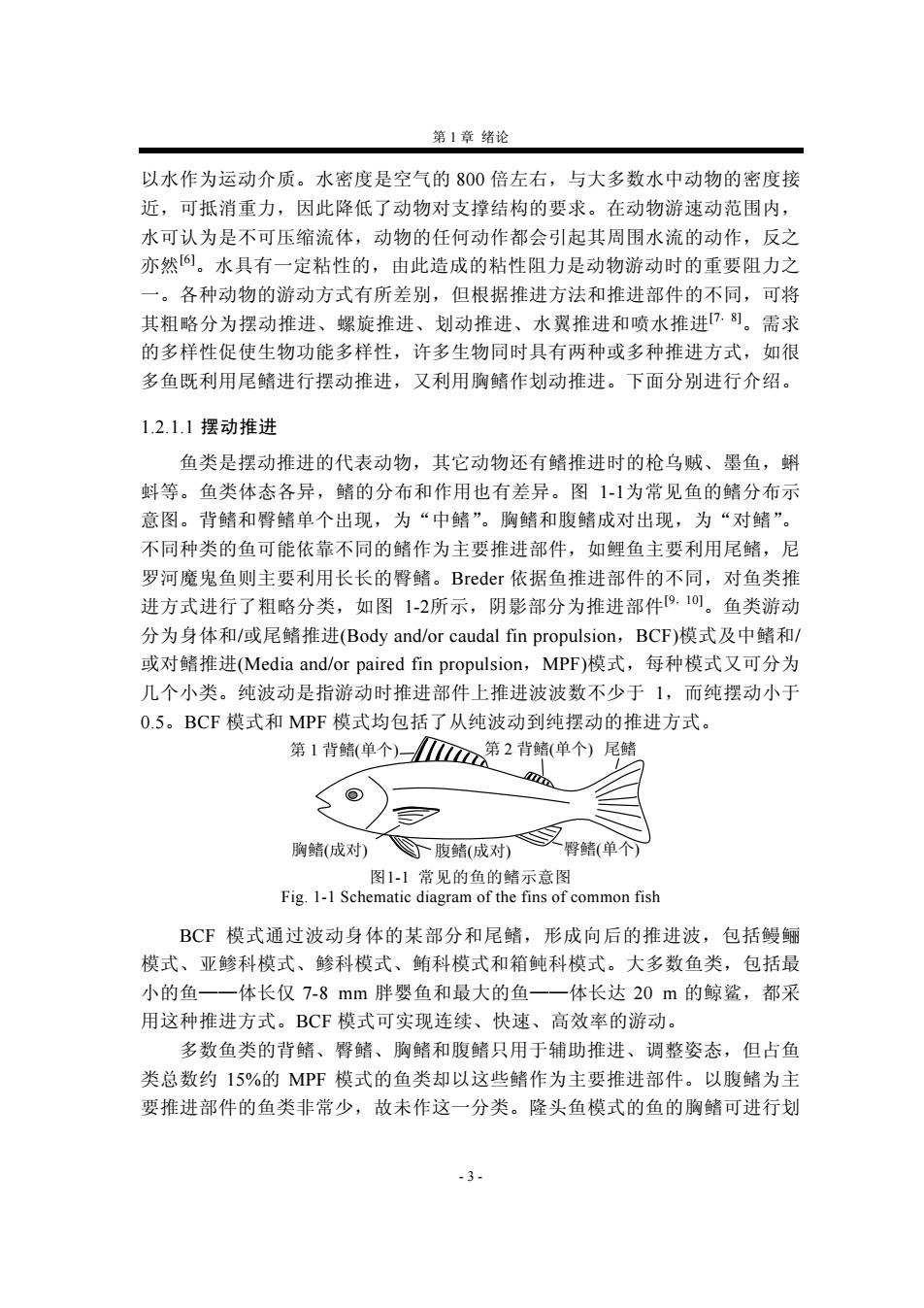
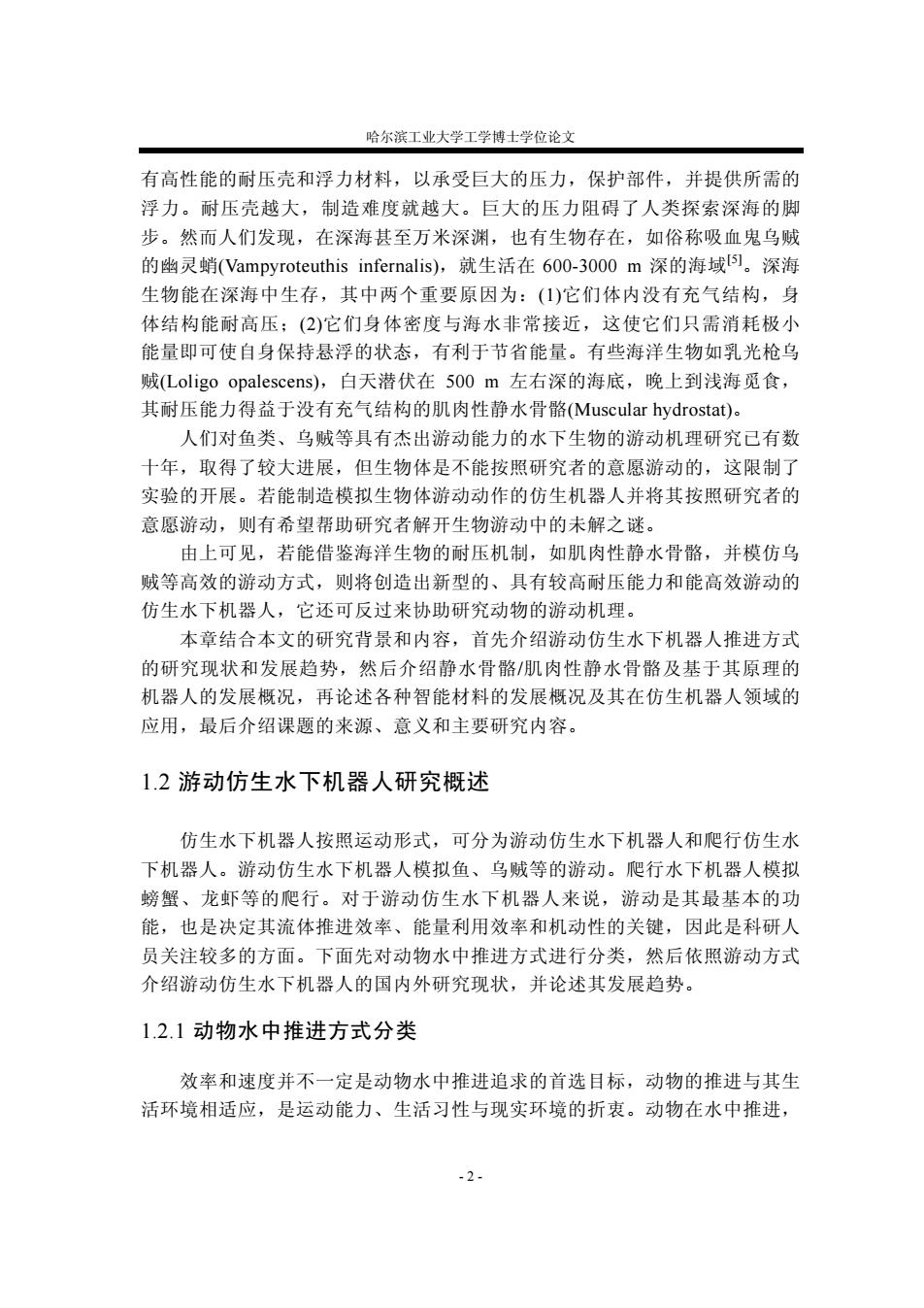
第1章绪论 以水作为运动介质。水密度是空气的800倍左右,与大多数水中动物的密度接 近,可抵消重力,因此降低了动物对支撑结构的要求。在动物游速动范围内, 水可认为是不可压缩流体,动物的任何动作都会引起其周围水流的动作,反之 亦然6。水具有一定粘性的,由此造成的粘性阻力是动物游动时的重要阻力之 一。各种动物的游动方式有所差别,但根据推进方法和推进部件的不同,可将 其粗略分为摆动推进、螺旋推进、划动推进、水翼推进和喷水推进?8)。需求 的多样性促使生物功能多样性,许多生物同时具有两种或多种推进方式,如很 多鱼既利用尾鳍进行摆动推进,又利用胸鳍作划动推进。下面分别进行介绍。 1.2.1.1摆动推进 鱼类是摆动推进的代表动物,其它动物还有鳍推进时的枪乌贼、墨鱼,蝌 蚪等。鱼类体态各异,鳍的分布和作用也有差异。图1-1为常见鱼的鳍分布示 意图。背鳍和臀鳍单个出现,为“中鳍”。胸鳍和腹鳍成对出现,为“对鳍”。 不同种类的鱼可能依靠不同的鳍作为主要推进部件,如鲤鱼主要利用尾鳍,尼 罗河魔鬼鱼则主要利用长长的臀鳍。Breder依据鱼推进部件的不同,对鱼类推 进方式进行了粗略分类,如图1-2所示,阴影部分为推进部件9.10。鱼类游动 分为身体和/或尾鳍推进(Body and/or caudal fin propulsion,BCF)模式及中鳍和/ 或对鳍推进(Media and/or paired fin propulsion,MPF)模式,每种模式又可分为 几个小类。纯波动是指游动时推进部件上推进波波数不少于1,而纯摆动小于 0.5。BCF模式和MP℉模式均包括了从纯波动到纯摆动的推进方式。 第1背鳍(单个)一第2背鳍(单个)尾鳍 胸鳍(成对) 腹鳍(成对) ~臀鳍(单个) 图1-1常见的鱼的鳍示意图 Fig.1-1 Schematic diagram of the fins of common fish BC℉模式通过波动身体的某部分和尾鳍,形成向后的推进波,包括鳗鲡 模式、亚鲹科模式、鲹科模式、鲔科模式和箱鲀科模式。大多数鱼类,包括最 小的鱼一一体长仅7-8mm胖婴鱼和最大的鱼一一体长达20m的鲸鲨,都采 用这种推进方式。BCF模式可实现连续、快速、高效率的游动。 多数鱼类的背鳍、臀鳍、胸鳍和腹鳍只用于辅助推进、调整姿态,但占鱼 类总数约15%的MP℉模式的鱼类却以这些鳍作为主要推进部件。以腹鳍为主 要推进部件的鱼类非常少,故未作这一分类。隆头鱼模式的鱼的胸鳍可进行划 -3
第 1 章 绪论 - 3 - 以水作为运动介质。水密度是空气的 800 倍左右,与大多数水中动物的密度接 近,可抵消重力,因此降低了动物对支撑结构的要求。在动物游速动范围内, 水可认为是不可压缩流体,动物的任何动作都会引起其周围水流的动作,反之 亦然[6]。水具有一定粘性的,由此造成的粘性阻力是动物游动时的重要阻力之 一。各种动物的游动方式有所差别,但根据推进方法和推进部件的不同,可将 其粗略分为摆动推进、螺旋推进、划动推进、水翼推进和喷水推进[7,8]。需求 的多样性促使生物功能多样性,许多生物同时具有两种或多种推进方式,如很 多鱼既利用尾鳍进行摆动推进,又利用胸鳍作划动推进。下面分别进行介绍。 1.2.1.1 摆动推进 鱼类是摆动推进的代表动物,其它动物还有鳍推进时的枪乌贼、墨鱼,蝌 蚪等。鱼类体态各异,鳍的分布和作用也有差异。图 1-1为常见鱼的鳍分布示 意图。背鳍和臀鳍单个出现,为“中鳍”。胸鳍和腹鳍成对出现,为“对鳍”。 不同种类的鱼可能依靠不同的鳍作为主要推进部件,如鲤鱼主要利用尾鳍,尼 罗河魔鬼鱼则主要利用长长的臀鳍。Breder 依据鱼推进部件的不同,对鱼类推 进方式进行了粗略分类,如图 1-2所示,阴影部分为推进部件[9,10]。鱼类游动 分为身体和/或尾鳍推进(Body and/or caudal fin propulsion,BCF)模式及中鳍和/ 或对鳍推进(Media and/or paired fin propulsion,MPF)模式,每种模式又可分为 几个小类。纯波动是指游动时推进部件上推进波波数不少于 1,而纯摆动小于 0.5。BCF 模式和 MPF 模式均包括了从纯波动到纯摆动的推进方式。 第 1 背鳍(单个) 第 2 背鳍(单个) 尾鳍 胸鳍(成对) 腹鳍(成对) 臀鳍(单个) 图1-1 常见的鱼的鳍示意图 Fig. 1-1 Schematic diagram of the fins of common fish BCF 模式通过波动身体的某部分和尾鳍,形成向后的推进波,包括鳗鲡 模式、亚鲹科模式、鲹科模式、鲔科模式和箱鲀科模式。大多数鱼类,包括最 小的鱼——体长仅 7-8 mm 胖婴鱼和最大的鱼——体长达 20 m 的鲸鲨,都采 用这种推进方式。BCF 模式可实现连续、快速、高效率的游动。 多数鱼类的背鳍、臀鳍、胸鳍和腹鳍只用于辅助推进、调整姿态,但占鱼 类总数约 15%的 MPF 模式的鱼类却以这些鳍作为主要推进部件。以腹鳍为主 要推进部件的鱼类非常少,故未作这一分类。隆头鱼模式的鱼的胸鳍可进行划
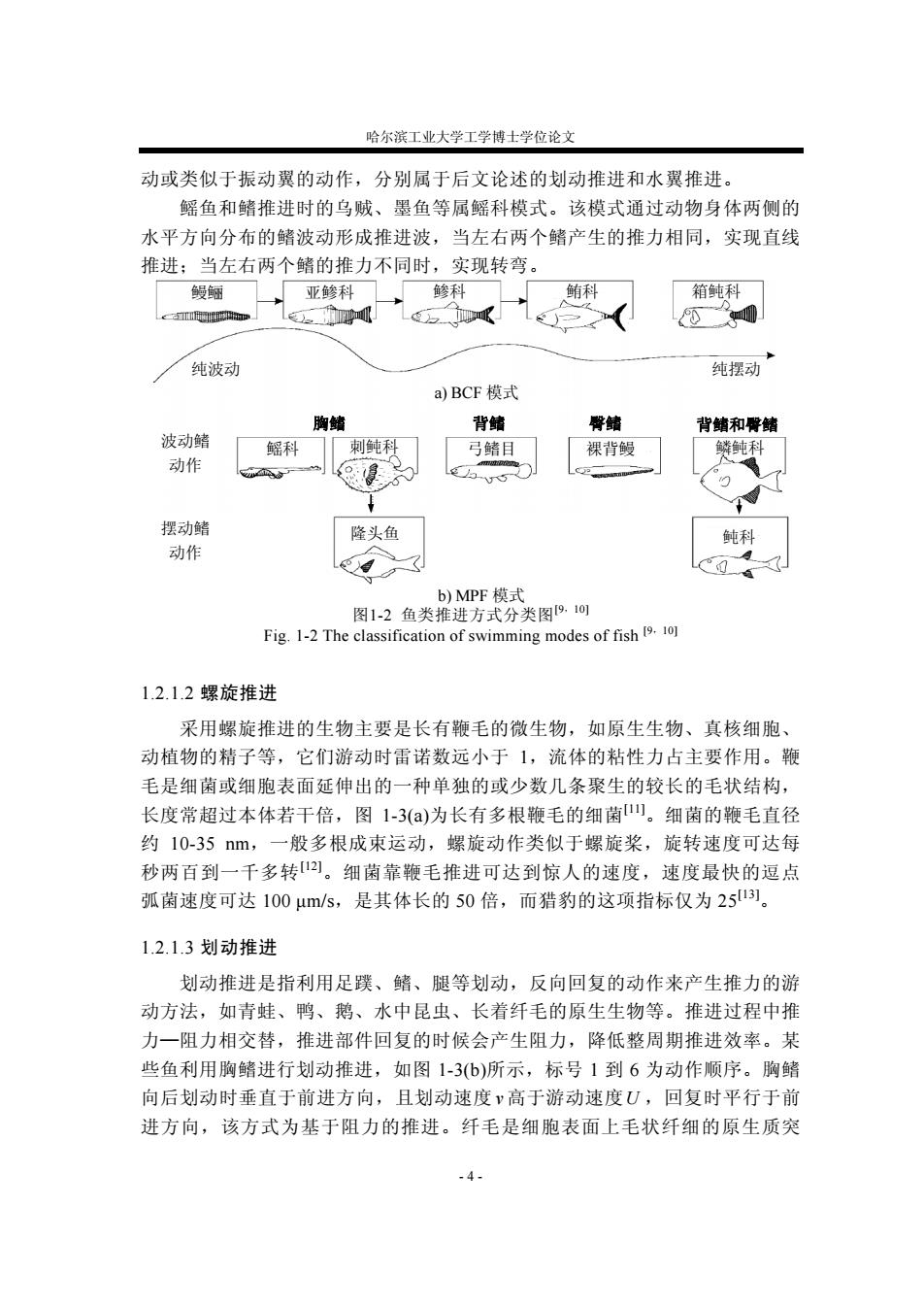
哈尔滨工业大学工学博士学位论文 动或类似于振动翼的动作,分别属于后文论述的划动推进和水翼推进。 鳐鱼和鳍推进时的乌贼、墨鱼等属鳐科模式。该模式通过动物身体两侧的 水平方向分布的鳍波动形成推进波,当左右两个鳍产生的推力相同,实现直线 推进:当左右两个鳍的推力不同时,实现转弯。 鳗鲡 亚鲹科 鲹科 鲔科 箱鲀科 am L了吧 大 纯波动 纯摆动 a)BCF模式 胸鳍 背鳍 臀鳍 背鳍和臀鳍 波动鳍 鳐科 刺鲀科 弓鳍目 裸背鳗 鳞鲀科 动作 摆动鳍 隆头鱼 鲀科 动作 b)MPF模式 图1-2鱼类推进方式分类图9.10) Fig.1-2 The classification of swimming modes of fish10 1.2.1.2螺旋推进 采用螺旋推进的生物主要是长有鞭毛的微生物,如原生生物、真核细胞、 动植物的精子等,它们游动时雷诺数远小于1,流体的粘性力占主要作用。鞭 毛是细菌或细胞表面延伸出的一种单独的或少数几条聚生的较长的毛状结构, 长度常超过本体若干倍,图1-3(a)为长有多根鞭毛的细菌。细菌的鞭毛直径 约10-35nm,一般多根成束运动,螺旋动作类似于螺旋桨,旋转速度可达每 秒两百到一千多转。细菌靠鞭毛推进可达到惊人的速度,速度最快的逗点 弧菌速度可达100μm/s,是其体长的50倍,而猎豹的这项指标仅为2513]。 1.2.1.3划动推进 划动推进是指利用足蹼、鳍、腿等划动,反向回复的动作来产生推力的游 动方法,如青蛙、鸭、鹅、水中昆虫、长着纤毛的原生生物等。推进过程中推 力一阻力相交替,推进部件回复的时候会产生阻力,降低整周期推进效率。某 些鱼利用胸鳍进行划动推进,如图1-3(b)所示,标号1到6为动作顺序。胸鳍 向后划动时垂直于前进方向,且划动速度ⅴ高于游动速度U,回复时平行于前 进方向,该方式为基于阻力的推进。纤毛是细胞表面上毛状纤细的原生质突
哈尔滨工业大学工学博士学位论文 - 4 - 动或类似于振动翼的动作,分别属于后文论述的划动推进和水翼推进。 鳐鱼和鳍推进时的乌贼、墨鱼等属鳐科模式。该模式通过动物身体两侧的 水平方向分布的鳍波动形成推进波,当左右两个鳍产生的推力相同,实现直线 推进;当左右两个鳍的推力不同时,实现转弯。 鳗鲡 刺鲀科 亚鲹科 鲹科 鲔科 箱鲀科 纯波动 纯摆动 波动鳍 动作 摆动鳍 动作 鳐科 胸鳍 背鳍 臀鳍 背鳍和臀鳍 隆头鱼 弓鳍目 裸背鳗 鳞鲀科 鲀科 a) BCF 模式 b) MPF 模式 图1-2 鱼类推进方式分类图[9,10] Fig. 1-2 The classification of swimming modes of fish [9,10] 1.2.1.2 螺旋推进 采用螺旋推进的生物主要是长有鞭毛的微生物,如原生生物、真核细胞、 动植物的精子等,它们游动时雷诺数远小于 1,流体的粘性力占主要作用。鞭 毛是细菌或细胞表面延伸出的一种单独的或少数几条聚生的较长的毛状结构, 长度常超过本体若干倍,图 1-3(a)为长有多根鞭毛的细菌[11]。细菌的鞭毛直径 约 10-35 nm,一般多根成束运动,螺旋动作类似于螺旋桨,旋转速度可达每 秒两百到一千多转[12]。细菌靠鞭毛推进可达到惊人的速度,速度最快的逗点 弧菌速度可达 100 μm/s,是其体长的 50 倍,而猎豹的这项指标仅为 25[13]。 1.2.1.3 划动推进 划动推进是指利用足蹼、鳍、腿等划动,反向回复的动作来产生推力的游 动方法,如青蛙、鸭、鹅、水中昆虫、长着纤毛的原生生物等。推进过程中推 力—阻力相交替,推进部件回复的时候会产生阻力,降低整周期推进效率。某 些鱼利用胸鳍进行划动推进,如图 1-3(b)所示,标号 1 到 6 为动作顺序。胸鳍 向后划动时垂直于前进方向,且划动速度 v 高于游动速度U ,回复时平行于前 进方向,该方式为基于阻力的推进。纤毛是细胞表面上毛状纤细的原生质突
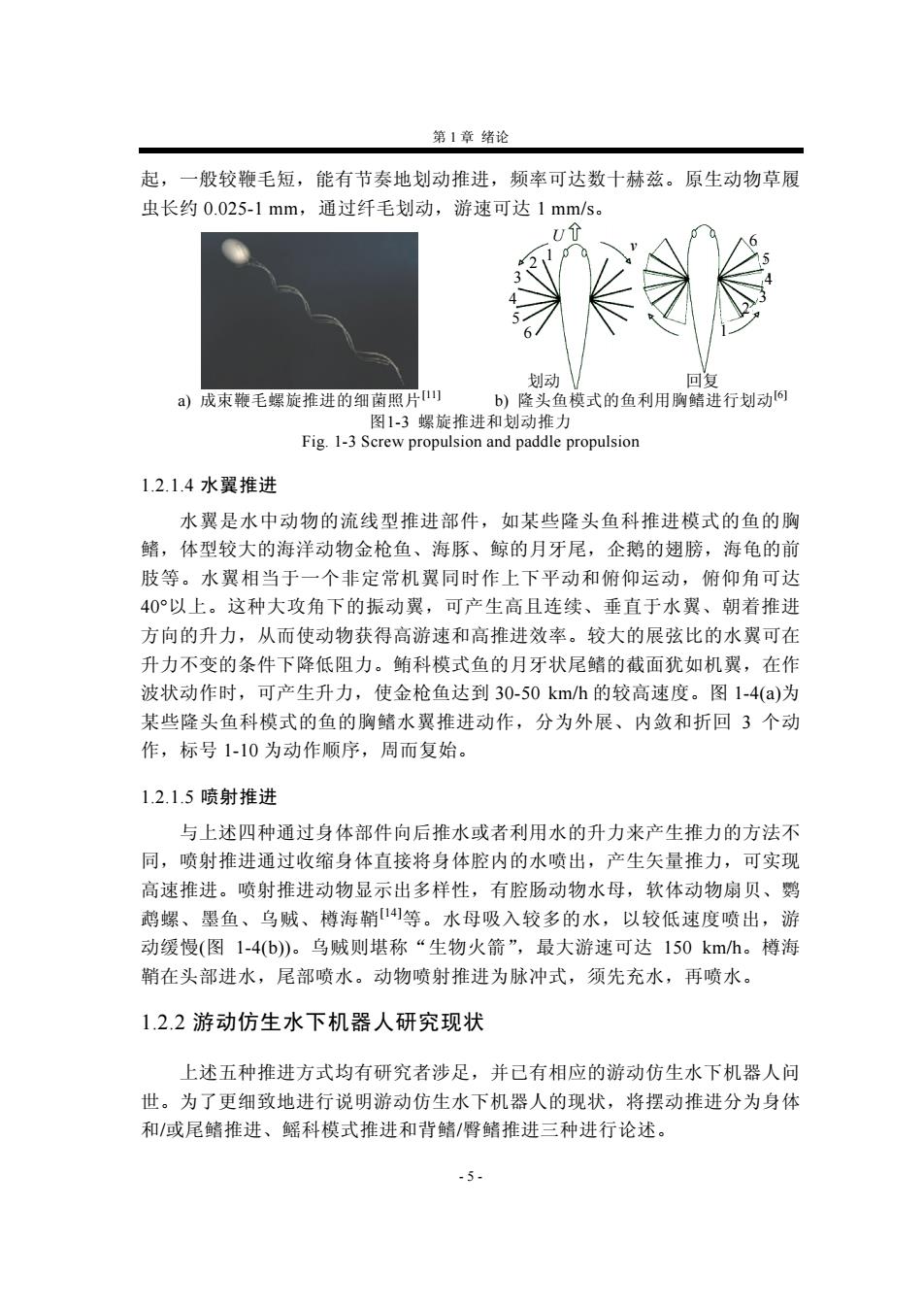
第1章绪论 起,一般较鞭毛短,能有节奏地划动推进,频率可达数十赫兹。原生动物草履 虫长约0.025-1mm,通过纤毛划动,游速可达1mm/s。 U 划动 回复 a)成束鞭毛螺旋推进的细菌照片山 b)隆头鱼模式的鱼利用胸鳍进行划动 图1-3螺旋推进和划动推力 Fig.1-3 Screw propulsion and paddle propulsion 1.2.1.4水翼推进 水翼是水中动物的流线型推进部件,如某些隆头鱼科推进模式的鱼的胸 鳍,体型较大的海洋动物金枪鱼、海豚、鲸的月牙尾,企鹅的翅膀,海龟的前 肢等。水翼相当于一个非定常机翼同时作上下平动和俯仰运动,俯仰角可达 40以上。这种大攻角下的振动翼,可产生高且连续、垂直于水翼、朝着推进 方向的升力,从而使动物获得高游速和高推进效率。较大的展弦比的水翼可在 升力不变的条件下降低阻力。鲔科模式鱼的月牙状尾鳍的截面犹如机翼,在作 波状动作时,可产生升力,使金枪鱼达到30-50km/h的较高速度。图1-4(a)为 某些隆头鱼科模式的鱼的胸鳍水翼推进动作,分为外展、内敛和折回3个动 作,标号1-10为动作顺序,周而复始。 1.2.1.5喷射推进 与上述四种通过身体部件向后推水或者利用水的升力来产生推力的方法不 同,喷射推进通过收缩身体直接将身体腔内的水喷出,产生矢量推力,可实现 高速推进。喷射推进动物显示出多样性,有腔肠动物水母,软体动物扇贝、鹦 鹉螺、墨鱼、乌贼、樽海鞘4等。水母吸入较多的水,以较低速度喷出,游 动缓慢(图1-4(b)。乌贼则堪称“生物火箭”,最大游速可达150km/h。樽海 鞘在头部进水,尾部喷水。动物喷射推进为脉冲式,须先充水,再喷水。 1.2.2游动仿生水下机器人研究现状 上述五种推进方式均有研究者涉足,并已有相应的游动仿生水下机器人问 世。为了更细致地进行说明游动仿生水下机器人的现状,将摆动推进分为身体 和/或尾鳍推进、鳐科模式推进和背鳍/臀鳍推进三种进行论述。 -5-
第 1 章 绪论 - 5 - 起,一般较鞭毛短,能有节奏地划动推进,频率可达数十赫兹。原生动物草履 虫长约 0.025-1 mm,通过纤毛划动,游速可达 1 mm/s。 v U 划动 回复 1 2 3 4 5 6 6 5 4 3 1 2 a) 成束鞭毛螺旋推进的细菌照片[11] b) 隆头鱼模式的鱼利用胸鳍进行划动[6] 图1-3 螺旋推进和划动推力 Fig. 1-3 Screw propulsion and paddle propulsion 1.2.1.4 水翼推进 水翼是水中动物的流线型推进部件,如某些隆头鱼科推进模式的鱼的胸 鳍,体型较大的海洋动物金枪鱼、海豚、鲸的月牙尾,企鹅的翅膀,海龟的前 肢等。水翼相当于一个非定常机翼同时作上下平动和俯仰运动,俯仰角可达 40°以上。这种大攻角下的振动翼,可产生高且连续、垂直于水翼、朝着推进 方向的升力,从而使动物获得高游速和高推进效率。较大的展弦比的水翼可在 升力不变的条件下降低阻力。鲔科模式鱼的月牙状尾鳍的截面犹如机翼,在作 波状动作时,可产生升力,使金枪鱼达到 30-50 km/h 的较高速度。图 1-4(a)为 某些隆头鱼科模式的鱼的胸鳍水翼推进动作,分为外展、内敛和折回 3 个动 作,标号 1-10 为动作顺序,周而复始。 1.2.1.5 喷射推进 与上述四种通过身体部件向后推水或者利用水的升力来产生推力的方法不 同,喷射推进通过收缩身体直接将身体腔内的水喷出,产生矢量推力,可实现 高速推进。喷射推进动物显示出多样性,有腔肠动物水母,软体动物扇贝、鹦 鹉螺、墨鱼、乌贼、樽海鞘[14]等。水母吸入较多的水,以较低速度喷出,游 动缓慢(图 1-4(b))。乌贼则堪称“生物火箭”,最大游速可达 150 km/h。樽海 鞘在头部进水,尾部喷水。动物喷射推进为脉冲式,须先充水,再喷水。 1.2.2 游动仿生水下机器人研究现状 上述五种推进方式均有研究者涉足,并已有相应的游动仿生水下机器人问 世。为了更细致地进行说明游动仿生水下机器人的现状,将摆动推进分为身体 和/或尾鳍推进、鳐科模式推进和背鳍/臀鳍推进三种进行论述
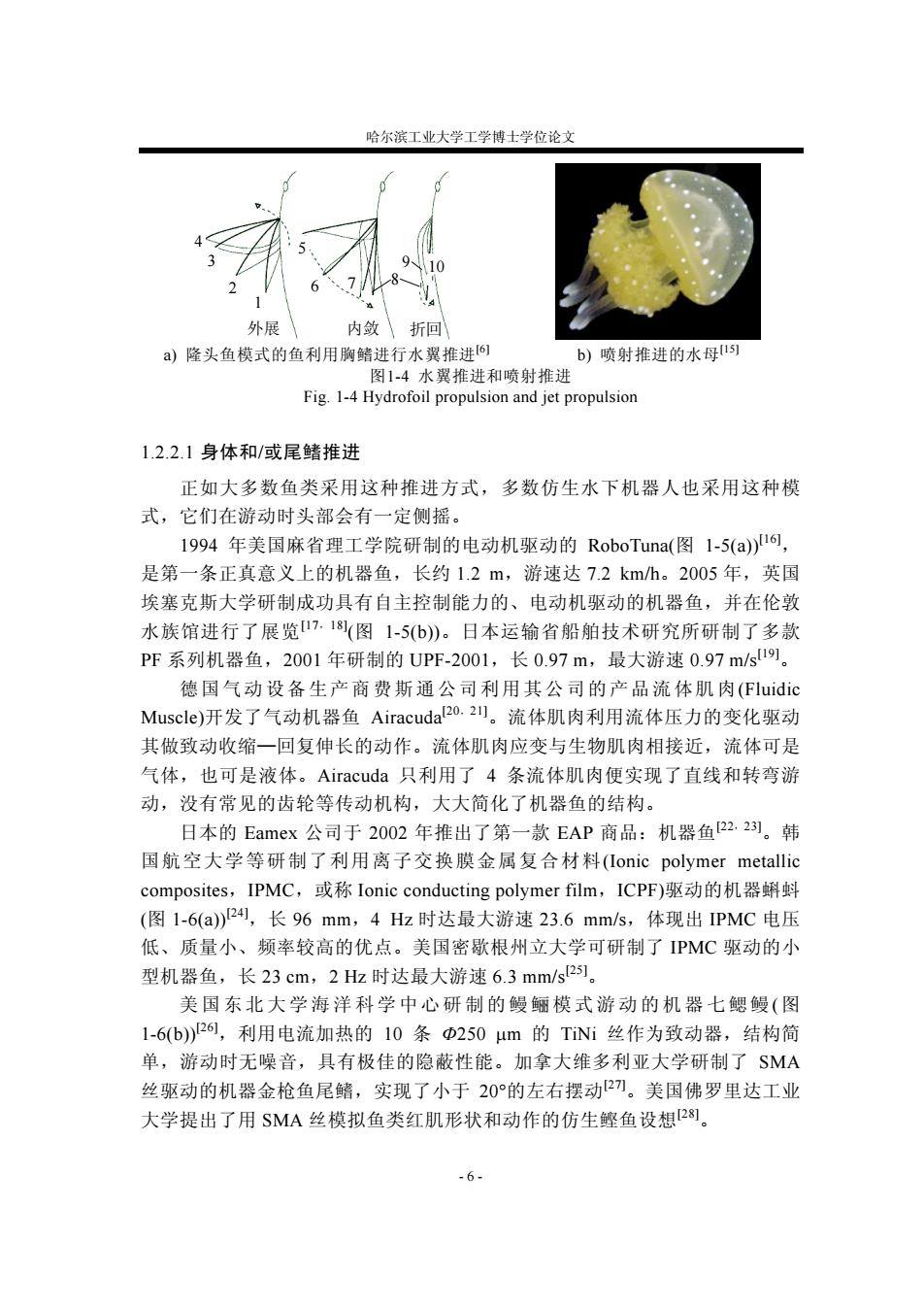
哈尔滨工业大学工学博士学位论文 外展 内敛 折回 a)隆头鱼模式的鱼利用胸鳍进行水翼推进6] b)喷射推进的水母吲 图1-4水翼推进和喷射推进 Fig.1-4 Hydrofoil propulsion and jet propulsion 1.2.2.1身体和/或尾鳍推进 正如大多数鱼类采用这种推进方式,多数仿生水下机器人也采用这种模 式,它们在游动时头部会有一定侧摇。 1994年美国麻省理工学院研制的电动机驱动的RoboTunat(图1-5(a)16, 是第一条正真意义上的机器鱼,长约1.2m,游速达7.2km/h。2005年,英国 埃塞克斯大学研制成功具有自主控制能力的、电动机驱动的机器鱼,并在伦敦 水族馆进行了展览17.18(图1-5b)。日本运输省船舶技术研究所研制了多款 PF系列机器鱼,2001年研制的UPF-2001,长0.97m,最大游速0.97m/s)。 德国气动设备生产商费斯通公司利用其公司的产品流体肌肉(Fluidic Muscle)开发了气动机器鱼Airacuda2o.2。流体肌肉利用流体压力的变化驱动 其做致动收缩一回复伸长的动作。流体肌肉应变与生物肌肉相接近,流体可是 气体,也可是液体。Airacuda只利用了4条流体肌肉便实现了直线和转弯游 动,没有常见的齿轮等传动机构,大大简化了机器鱼的结构。 日本的Eamex公司于2002年推出了第一款EAP商品:机器鱼22,2)。韩 国航空大学等研制了利用离子交换膜金属复合材料(Ionic polymer metallic composites,IPMC,或称Ionic conducting polymer film,ICPF)驱动的机器蝌蚪 (图1-6(a)24,长96mm,4Hz时达最大游速23.6mms,体现出IPMC电压 低、质量小、频率较高的优点。美国密歇根州立大学可研制了PMC驱动的小 型机器鱼,长23cm,2Hz时达最大游速6.3mm/s2]。 美国东北大学海洋科学中心研制的鳗鲡模式游动的机器七鳃鳗(图 1-6(b)2,利用电流加热的10条Φ250μm的TiNi丝作为致动器,结构简 单,游动时无噪音,具有极佳的隐蔽性能。加拿大维多利亚大学研制了SMA 丝驱动的机器金枪鱼尾鳍,实现了小于20°的左右摆动2刀。美国佛罗里达工业 大学提出了用SMA丝模拟鱼类红肌形状和动作的仿生鲣鱼设想28)。 -6-
哈尔滨工业大学工学博士学位论文 - 6 - 外展 内敛 折回 4 3 2 1 5 6 7 8 10 9 a) 隆头鱼模式的鱼利用胸鳍进行水翼推进[6] b) 喷射推进的水母[15] 图1-4 水翼推进和喷射推进 Fig. 1-4 Hydrofoil propulsion and jet propulsion 1.2.2.1 身体和/或尾鳍推进 正如大多数鱼类采用这种推进方式,多数仿生水下机器人也采用这种模 式,它们在游动时头部会有一定侧摇。 1994 年美国麻省理工学院研制的电动机驱动的 RoboTuna(图 1-5(a))[16], 是第一条正真意义上的机器鱼,长约 1.2 m,游速达 7.2 km/h。2005 年,英国 埃塞克斯大学研制成功具有自主控制能力的、电动机驱动的机器鱼,并在伦敦 水族馆进行了展览[17,18](图 1-5(b))。日本运输省船舶技术研究所研制了多款 PF 系列机器鱼,2001 年研制的 UPF-2001,长 0.97 m,最大游速 0.97 m/s[19]。 德国气动设备生产商费斯通公司利用其公司的产品流体肌肉(Fluidic Muscle)开发了气动机器鱼 Airacuda[20,21]。流体肌肉利用流体压力的变化驱动 其做致动收缩—回复伸长的动作。流体肌肉应变与生物肌肉相接近,流体可是 气体,也可是液体。Airacuda 只利用了 4 条流体肌肉便实现了直线和转弯游 动,没有常见的齿轮等传动机构,大大简化了机器鱼的结构。 日本的 Eamex 公司于 2002 年推出了第一款 EAP 商品:机器鱼[22,23]。韩 国航空大学等研制了利用离子交换膜金属复合材料(Ionic polymer metallic composites,IPMC,或称 Ionic conducting polymer film,ICPF)驱动的机器蝌蚪 (图 1-6(a))[24],长 96 mm,4 Hz 时达最大游速 23.6 mm/s,体现出 IPMC 电压 低、质量小、频率较高的优点。美国密歇根州立大学可研制了 IPMC 驱动的小 型机器鱼,长 23 cm,2 Hz 时达最大游速 6.3 mm/s[25]。 美国东北大学海洋科学中心研 制的鳗鲡模式游动的机器七鳃鳗 (图 1-6(b))[26],利用电流加热的 10 条 Ф250 μm 的 TiNi 丝作为致动器,结构简 单,游动时无噪音,具有极佳的隐蔽性能。加拿大维多利亚大学研制了 SMA 丝驱动的机器金枪鱼尾鳍,实现了小于 20°的左右摆动[27]。美国佛罗里达工业 大学提出了用 SMA 丝模拟鱼类红肌形状和动作的仿生鲣鱼设想[28]