
无人机飞行管理与控制系统 Flight management and control for UAV (Unmanned Aerial Vehicle) PPT演讲:胡蓉 mp4
无人机飞行管理与控制系统 Flight management and control for UAV (Unmanned Aerial Vehicle) PPT演讲:胡蓉 mp4

组成 〉飞控系统顾名思义就是飞行控制系统,主要由陀螺仪(飞行姿态感 知)、加速计、地磁感应、气压传感器(悬停控制)、GPS模块(选装)、 以及控制电路组成,主要的功能就是自动保持飞机的正常飞行姿态。 飞控系统是无人机的大脑。飞控一般包括传感器、机载计算机和伺 服作动设备三大部分,实现的功能主要有无人机姿态稳定和控制、 无人机任务设备管理和应急控制三大类。 GPS 气压传感器 GPS馍映
组成 〉飞控系统顾名思义就是飞行控制系统,主要由陀螺仪(飞行姿态感 知)、加速计、地磁感应、气压传感器(悬停控制)、GPS模块(选装)、 以及控制电路组成,主要的功能就是自动保持飞机的正常飞行姿态。 飞控系统是无人机的大脑。飞控一般包括传感器、机载计算机和伺 服作动设备三大部分,实现的功能主要有无人机姿态稳定和控制、 无人机任务设备管理和应急控制三大类。 陀螺仪 气压传感器 GPS模块
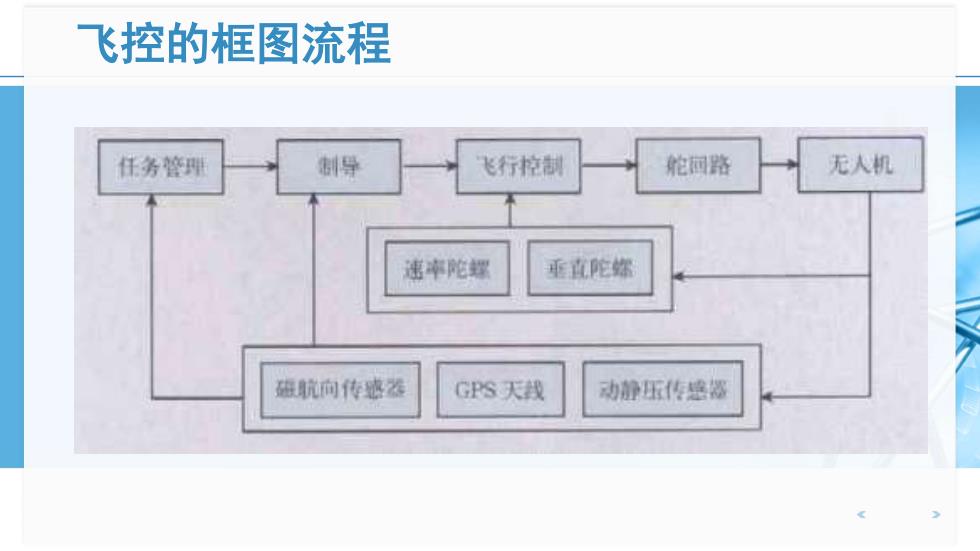
飞控的框图流程 任务管理 制导 飞行控制 舵问路 无人机 速率陀螺 垂直陀缩 磁航向传感器 GPS天我 动静压传是器
飞控的框图流程

m 动力系统 旋奖 智能电池 摄像机 遥控器
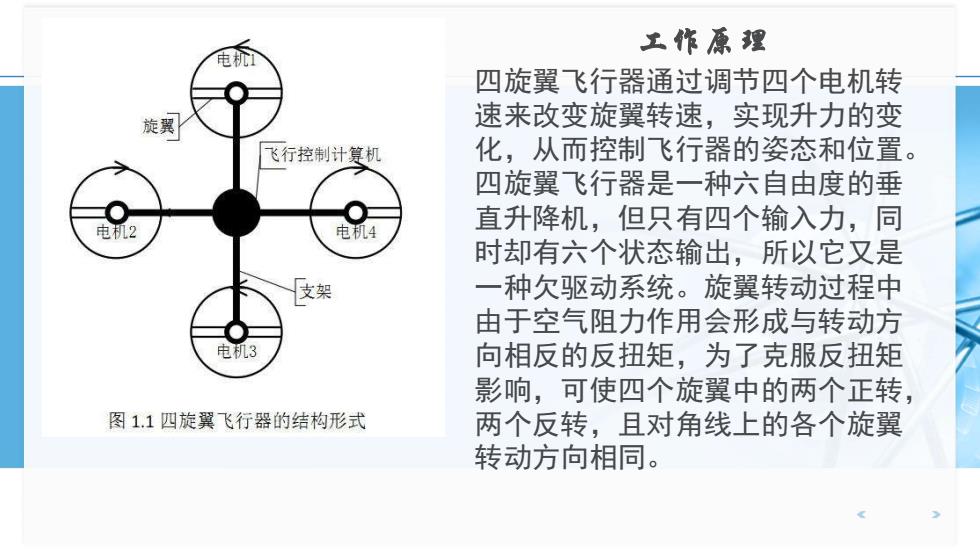
工作原理 电机 四旋翼飞行器通过调节四个电机转 旋翼 速来改变旋翼转速,实现升力的变 飞行控制计篑机 化,从而控制飞行器的姿态和位置。 四旋翼飞行器是一种六自由度的垂 电机2 电机4 直升降机,但只有四个输入力,同 时却有六个状态输出,所以它又是 支架 一种欠驱动系统。旋翼转动过程中 由于空气阻力作用会形成与转动方 电机3 向相反的反扭矩,为了克服反扭矩 影响,可使四个旋翼中的两个正转, 图1.1四旋翼飞行器的结构形式 两个反转,且对角线上的各个旋翼 转动方向相同
工作原理 四旋翼飞行器通过调节四个电机转 速来改变旋翼转速,实现升力的变 化,从而控制飞行器的姿态和位置。 四旋翼飞行器是一种六自由度的垂 直升降机,但只有四个输入力,同 时却有六个状态输出,所以它又是 一种欠驱动系统。旋翼转动过程中 由于空气阻力作用会形成与转动方 向相反的反扭矩,为了克服反扭矩 影响,可使四个旋翼中的两个正转, 两个反转,且对角线上的各个旋翼 转动方向相同