第一章教学目的要求 1、掌握普通船用雷达用于船舶避碰的方法 2、充分认识普通船用雷达用于船舶避碰的 局限性 3、了解ARPA的发展概况和基本类型 4、掌握ARPA系统的组成及各部分作用 5、知道ARPA有哪些输入输出信息
第一章 教学目的要求 1、掌握普通船用雷达用于船舶避碰的方法 2、充分认识普通船用雷达用于船舶避碰的 局限性 3、了解ARPA的发展概况和基本类型 4、掌握ARPA系统的组成及各部分作用 5、 知道ARPA有哪些输入输出信息
第一章绪论 。1-1普通船用雷达用于船舶避碰的局限性 一、普通船用雷达在船舶避碰中的应用 ◆船舶避碰包含“预测”和“避让”两个涵义。 。预测:预测本船与相遇船在何时(何处)会存在 碰撞危险。 。避让:本船对危险船采取的避让机动。 。问题:单纯依靠船用雷达提供的信息能否协助 船舶避碰? 1、相对运动人工标绘避碰法
第一章 绪论 ⚫ 1-1 普通船用雷达用于船舶避碰的局限性 一、普通船用雷达在船舶避碰中的应用 ◆ 船舶避碰包含“预测”和“避让”两个涵义。 ⚫ 预测:预测本船与相遇船在何时(何处)会存在 碰撞危险。 ⚫ 避让:本船对危险船采取的避让机动。 ⚫ 问题:单纯依靠船用雷达提供的信息能否 协助 船舶避碰? 1、相对运动人工标绘避碰法
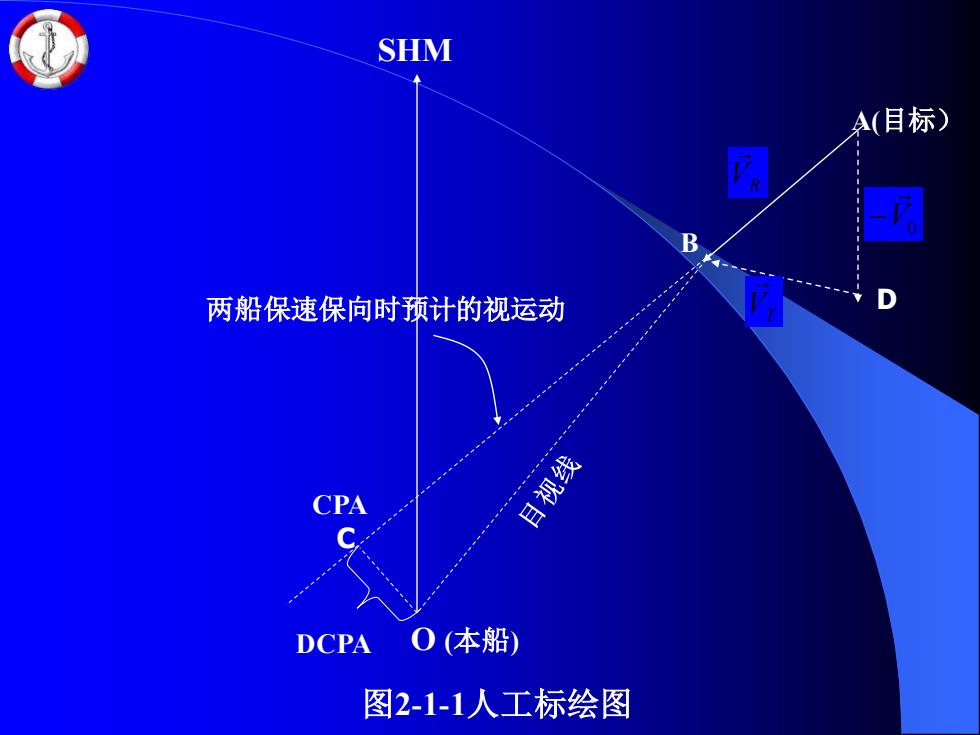
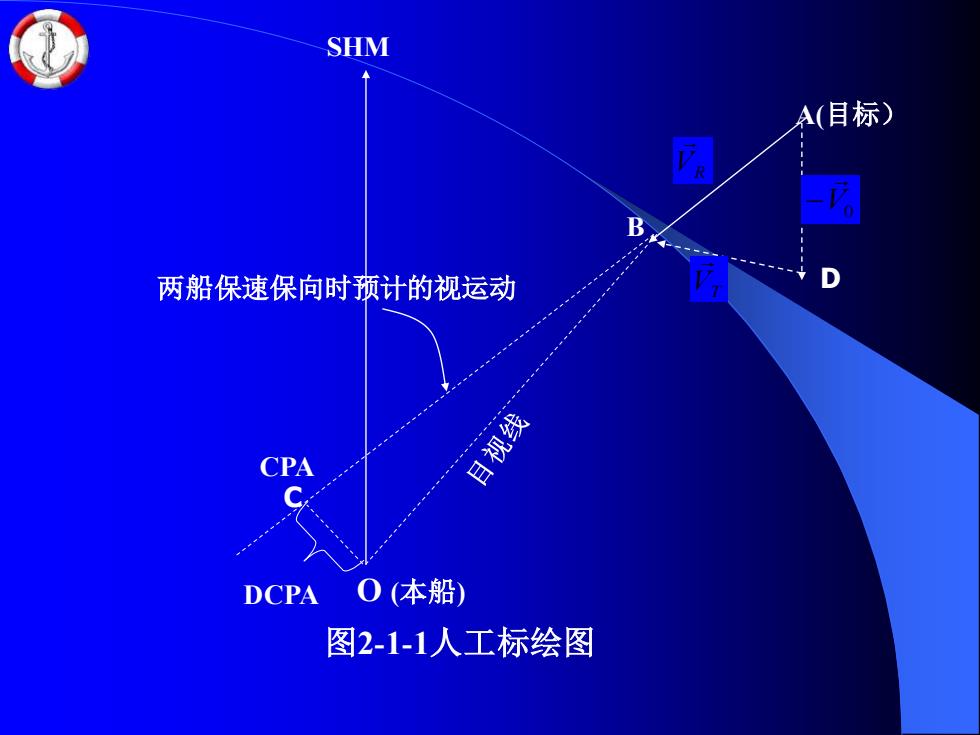
SHM A(目标) 两船保速保向时预计的视运动 CPA 目视线 DCPA O(本船) 图2-1-1人工标绘图
图2-1-1人工标绘图 O (本船) SHM A(目标) B DCPA CPA VR C D V0 − VT 两船保速保向时预计的视运动
SHM A(目标) B 两船保速保向时预计的视运动 CPA 目视线 DCPA O(本船) 图2-1-1人工标绘图
图2-1-1人工标绘图 O (本船) SHM A(目标) B DCPA CPA VR C D V0 − VT 两船保速保向时预计的视运动
人工标绘进行避碰的步骤 1、选择要进行标绘的相遇船回波(A) 2、监视该目标回波的移动 3、隔一定时间间隔(6min)标出B点 4、作图并求碰撞及航行参数 ① 碰撞参数: ●DCPA:最接近会遇距离 。TCPA:到达最接近点的时间
人工标绘进行避碰的步骤 1、选择要进行标绘的相遇船回波(A) 2、监视该目标回波的移动 3、隔一定时间间隔(6min)标出B点 4、作图并求碰撞及航行参数 ① 碰撞参数: ⚫ DCPA:最接近会遇距离 ⚫ TCPA:到达最接近点的时间