
一、水下仿生机器人国内外研究现状 东北大学的海洋学中心研制的龙虾机器人(2012) 龙虾 仿龙虾机器人 11
一、水下仿生机器人国内外研究现状 11 龙虾 仿龙虾机器人 东北大学的海洋学中心研制的龙虾机器人(2012)
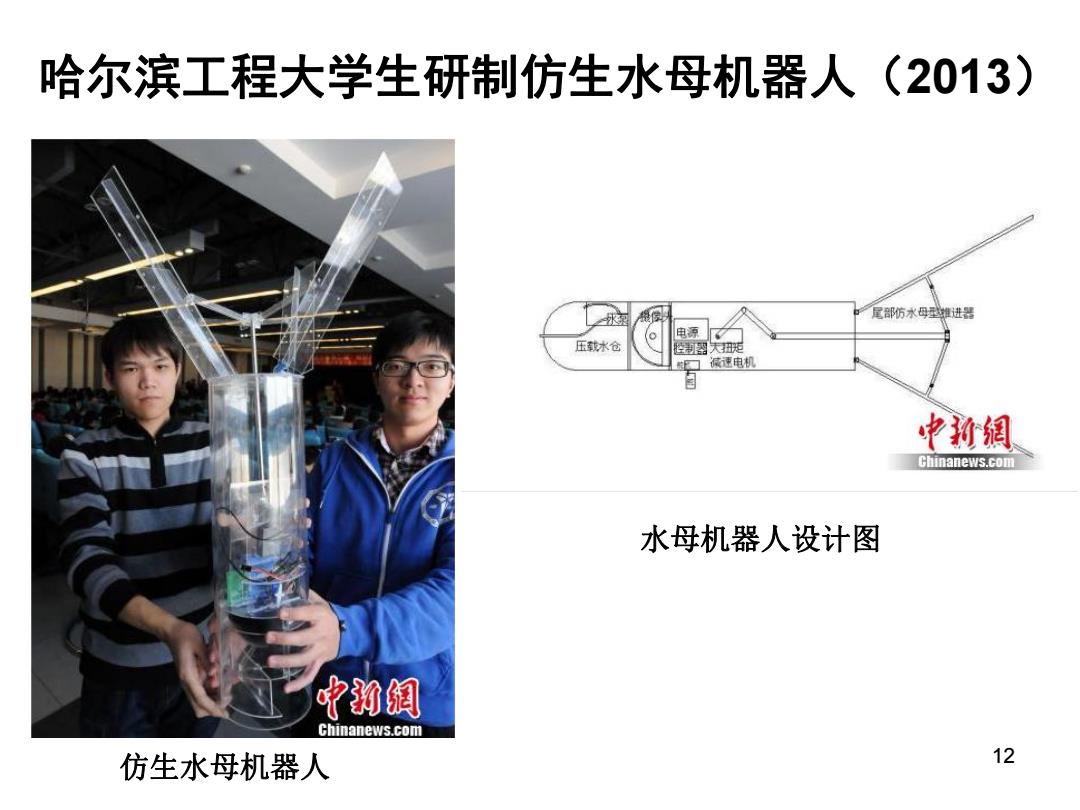
哈尔滨工程大学生研制仿生水母机器人(2013) 尾部仿水母型维进器 电源 压载水仓 性翠天扭范 减速电机 中抑绸 Chinanews.com 水母机器人设计图 中浙润 Chinanews.com 仿生水母机器人 12
哈尔滨工程大学生研制仿生水母机器人(2013) 仿生水母机器人 12 水母机器人设计图
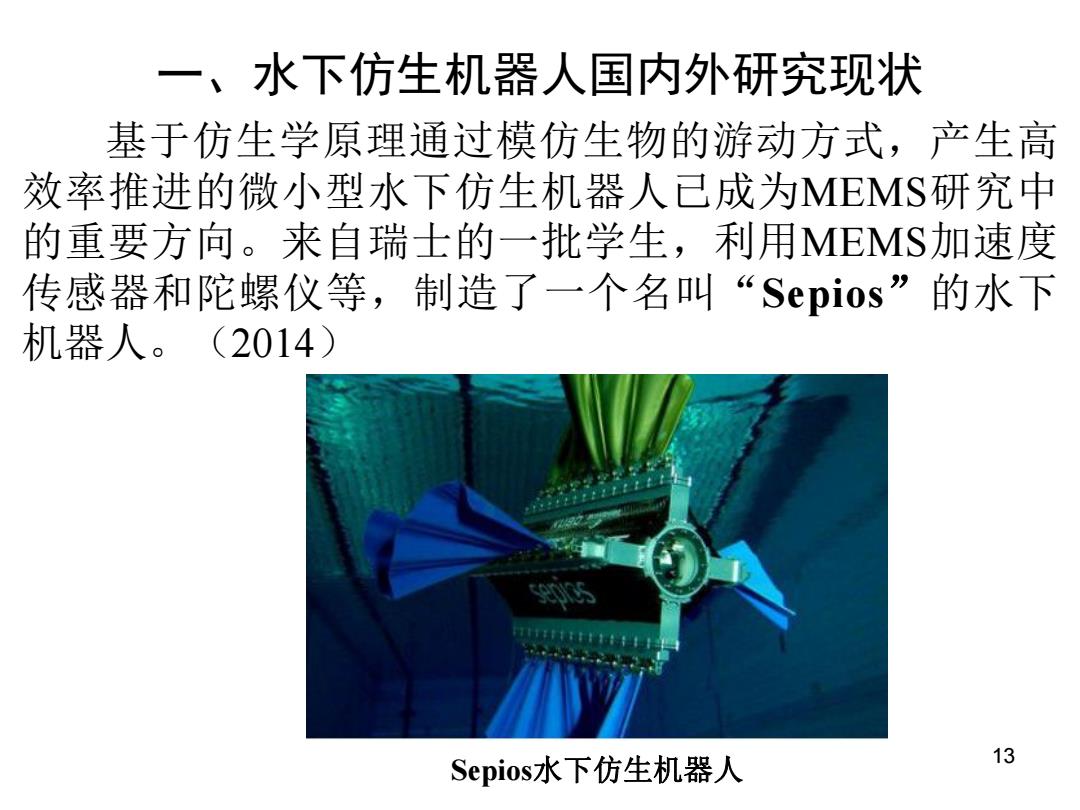
一、水下仿生机器人国内外研究现状 基于仿生学原理通过模仿生物的游动方式,产生高 效率推进的微小型水下仿生机器人已成为MEMS研究中 的重要方向。来自瑞士的一批学生,利用MEMS加速度 传感器和陀螺仪等,制造了一个名叫“Sepios”的水下 机器人。(2014) EEElliit Sepios水下仿生机器人 13
一、水下仿生机器人国内外研究现状 13 基于仿生学原理通过模仿生物的游动方式,产生高 效率推进的微小型水下仿生机器人已成为MEMS研究中 的重要方向。来自瑞士的一批学生,利用MEMS加速度 传感器和陀螺仪等,制造了一个名叫“Sepios”的水下 机器人。(2014) Sepios水下仿生机器人
一、水下仿生机器人国内外研究现状 哈尔滨工程大学郭书祥等人,于2008年攻克了水 中微型机器人的核心技术一离子聚合物CPF的制作 工艺,成功研制出“人造肌肉”。 特点:像肌肉一样可以柔性弯曲的生物型驱动器, 奠定了水下微型仿生机器人的发展基础。 优点:体积小、成本低、无噪音、无电磁干扰等; 用途:水污染探测、细小管道清淤、水下数据收集 、辅助手术等。 14
一、水下仿生机器人国内外研究现状 14 哈尔滨工程大学郭书祥等人,于2008年攻克了水 中微型机器人的核心技术——离子聚合物ICPF的制作 工艺,成功研制出“人造肌肉” 。 l 特点:像肌肉一样可以柔性弯曲的生物型驱动器, 奠定了水下微型仿生机器人的发展基础。 l 优点:体积小、成本低、无噪音、无电磁干扰等; l 用途:水污染探测、细小管道清淤、水下数据收集 、辅助手术等
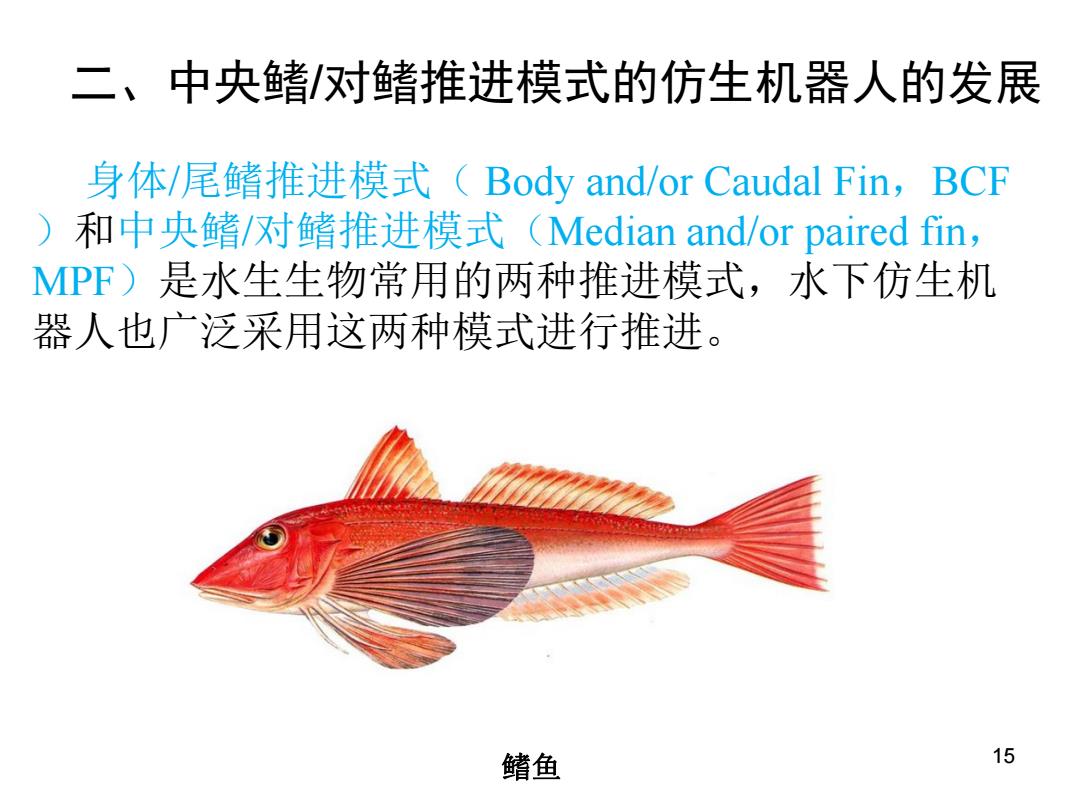
二、中央鳍对鳍推进模式的仿生机器人的发展 身体/尾鳍推进模式(Body and/or Caudal Fin,BCF )和中央鳍/对鳍推进模式(Median and/,or paired fin, MP℉)是水生生物常用的两种推进模式,水下仿生机 器人也广泛采用这两种模式进行推进。 鳍鱼 15
二、中央鳍/对鳍推进模式的仿生机器人的发展 15 身体/尾鳍推进模式( Body and/or Caudal Fin,BCF )和中央鳍/对鳍推进模式(Median and/or paired fin, MPF)是水生生物常用的两种推进模式,水下仿生机 器人也广泛采用这两种模式进行推进。 鳍鱼