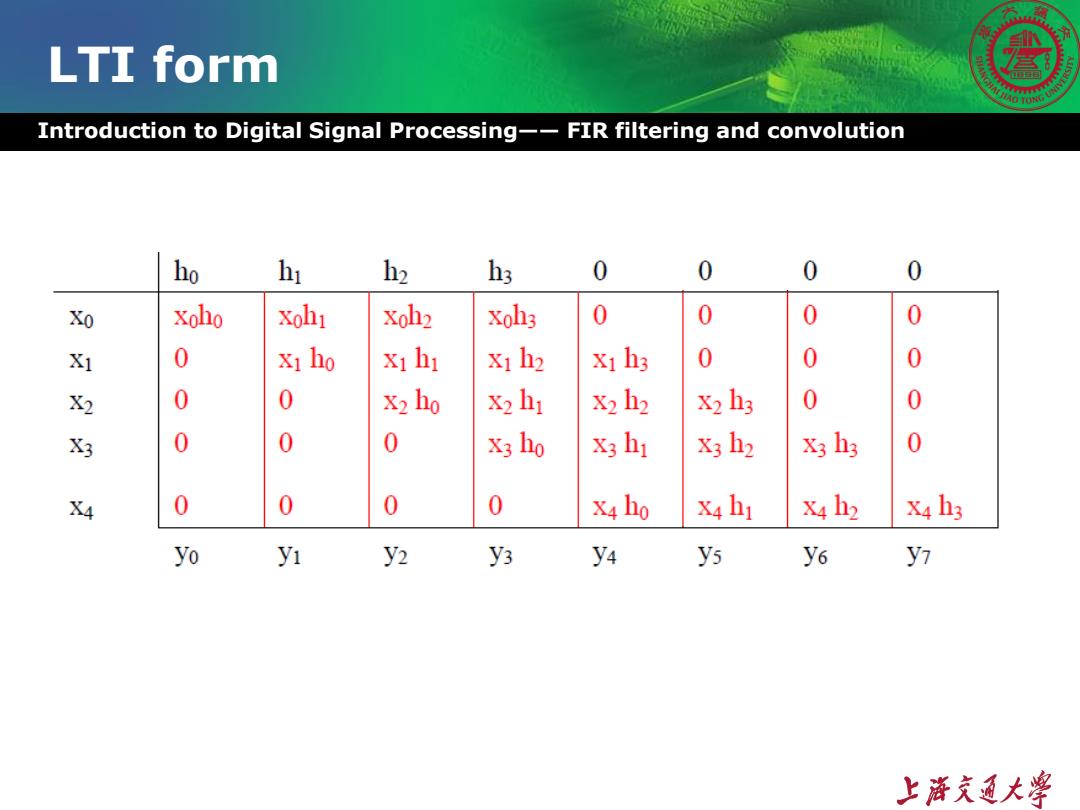
LTI form Introduction to Digital Signal Processing--FIR filtering and convolution ho h h2 h3 0 0 0 0 Xo xoho xohi Xoh2 Xoh3 0 0 0 0 X1 0 Xi ho Xihi X1 h2 Xi h3 0 0 0 X2 0 0 X2 ho X2 hi X2 h2 X2 h3 0 0 83 0 0 0 x3 ho X3 hi 3h2 &h3 0 X4 0 0 0 0 X4 ho X4hi X4 h2 X4h3 yo yi y2 y3 y4 ys y6 y1 上游充通大¥
Introduction to Digital Signal Processing—— FIR filtering and convolution LTI form
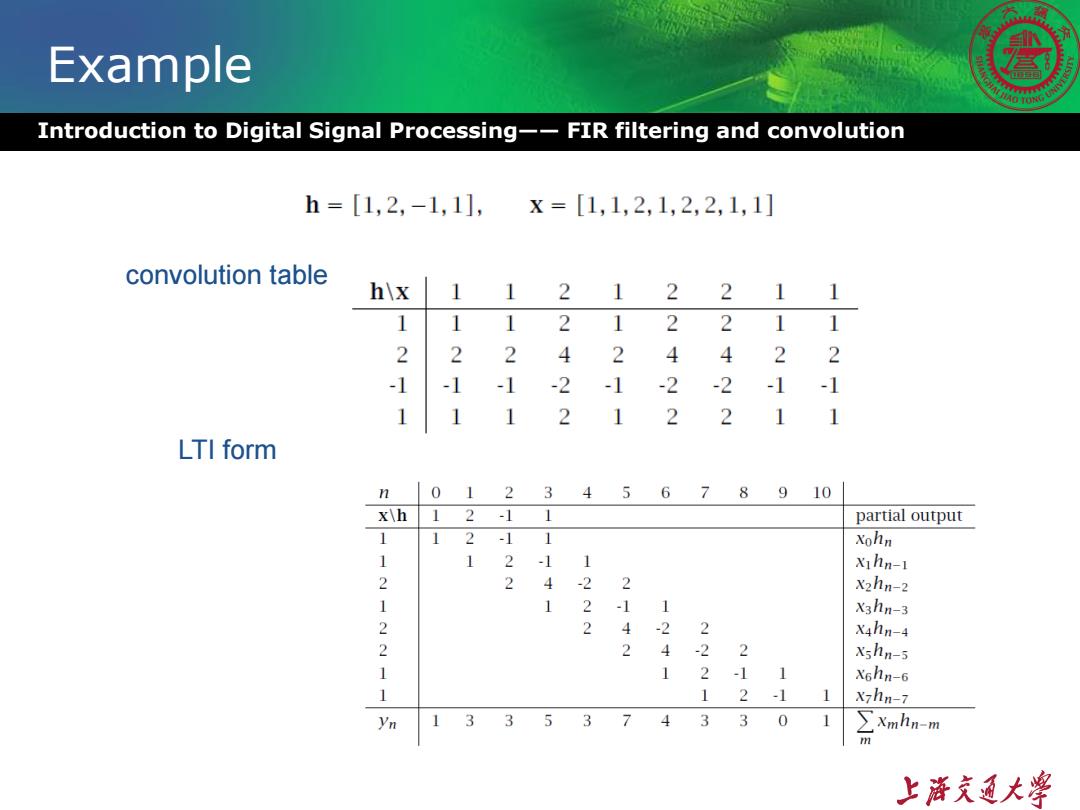
Example Introduction to Digital Signal Processing--FIR filtering and convolution h=[1,2,-1,1],X=[1,1,2,1,2,2,1,1] convolution table h\x1 12 12 21 1 1 1 12 122 11 2 2 2 4 2 4 4 2 2 -1 -1 -2 -1 -2 -2 -1 -1 1 1 2 1 2 2 1 LTI form n 0 123456 7 9 10 x\h 2 -1 1 partial output 1 1 2 -1 1 Xohn 1 1 2 -1 x1hn-1 2 4 -2 2 X2hn-2 1 -1 1 X3hn-3 2 2 -2 2 X4hn-4 2 2 4 -2 2 xshn-5 1 2 -1 1 X6hn-6 2 -1 X7hn-7 33537 4 3 3 0 ∑Xmhn-m 上游充通大
Example Introduction to Digital Signal Processing—— FIR filtering and convolution convolution table LTI form

Transient and steady state Introduction to Digital Signal Processing--FIR filtering and convolution Input on transient Steady state Input off transient max(0,n-L+1)=0 min(n,M)-n max(0,n-L+1)=0 min(n,M)=M max(0,n-L+1)=m-L+1 min(n,M=M 上游充通大¥
Introduction to Digital Signal Processing—— FIR filtering and convolution Transient and steady state
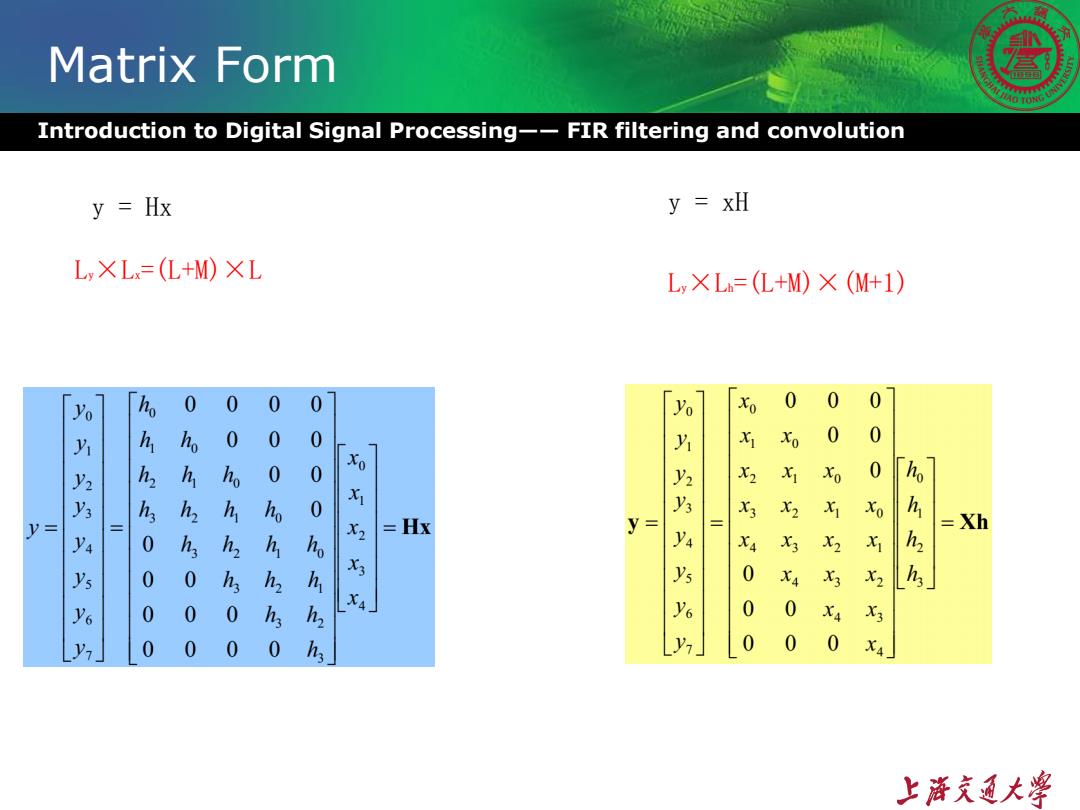
Matrix Form Introduction to Digital Signal Processing--FIR filtering and convolution y=Hx y xH L XL=(L+M)XL Ly×L=(L+M)×(M+1) o h 0 0 0 0 Xo 0 0 0 0 0 0 xo 0 0 h 0。 0 历乃乃乃归乃乐乃 Xo 0 X2 y= =Hx y= 七 =Xh 七3 X2 0 0 h 0 X3 0 0 0 40 0 0 0 0 0 0 0 0 上游充通大¥
Matrix Form Introduction to Digital Signal Processing—— FIR filtering and convolution y = Hx Ly×Lx=(L+M)×L Ly×Lh=(L+M)×(M+1) y = xH
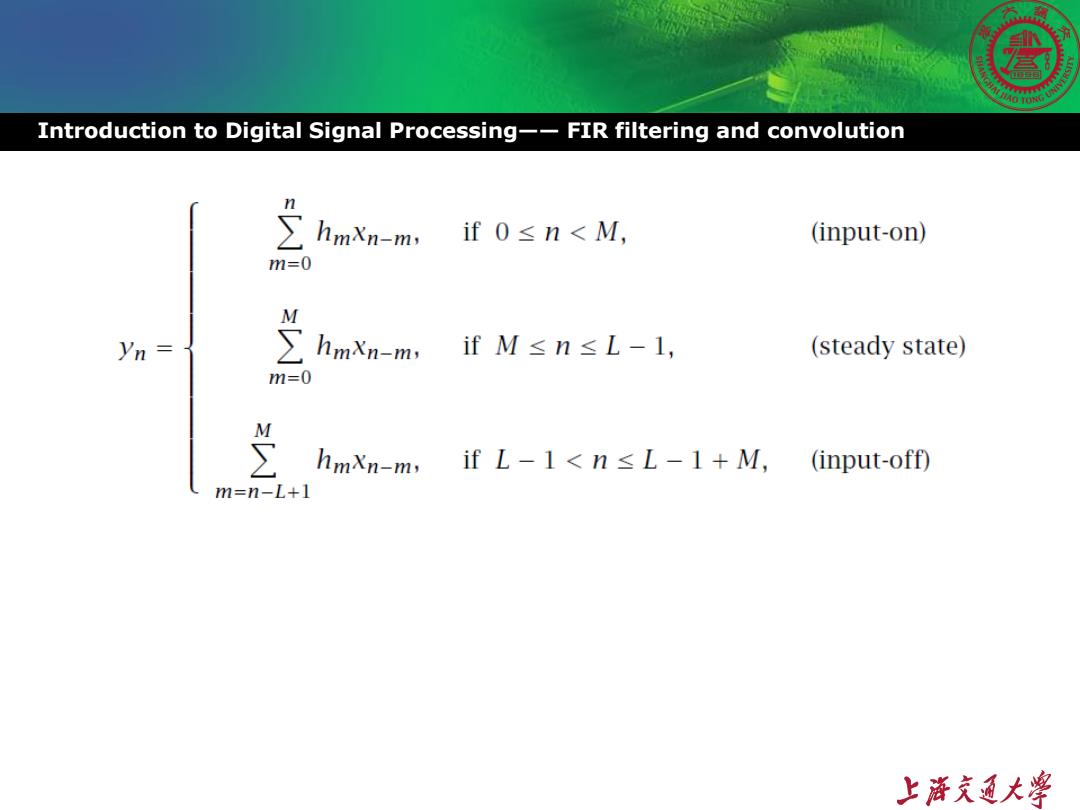
Introduction to Digital Signal Processing--FIR filtering and convolution n hmXn-m, if0≤n<M, (input-on) m=0 yn= ∑hmxn-m ,ifM≤n≤L-1, (steady state) m=0 M hmXn-m,if L-1<n<L-1+M, (input-off) m=n-L+1 上游充通大¥
Introduction to Digital Signal Processing—— FIR filtering and convolution