上海文夏大¥ ANGHAI JIAO TONG UNIVERSITY HALE UAV DESIGN 2.Design requirements In this chapter our design requirements will be determined based on our marketing.And we choose RQ-4A as our reference standard. 2.1.Main goal From what has been investigated,HALE UAV is playing a more and more important role.The HALE UAV is mainly used to carry out high reconnaissance,besides it can be used in airborne early warning, communications relay,electronic jamming and head off theater ballistic missiles,etc. Compared with reconnaissance satellite,the HALE UAV has its own features: lower cost than satellites,generally several tenths of that of satellite;and while executing missions,it can carry out continuous surveillance and collection of complete electronic communication information in selected target area according to the commanders'intend,while satellite can only round the earth according to its pre-set orbit.What's more,with lower altitude,UAV has fine resolution to the ground object. So our goal is to design a HALE UAV with long endurance and high reliability HALE UAV requires long endurance and long range.To low-speed UAV, endurance should be more than 24h.To high-speed UAV,voyage should have more than ten thousand meters voyage.Generally speaking,the airborne devices should have high reliability and a long continuous working time without failures.What's more,considering the energy consumption,the devices would have little redundancy. The task of our HALE UAV is mainly high reconnaissance and communications relay,in which different airborne devices are required.We will concentrate on finding these task loads in the following context,and we find that different task loads don't vary too much.Therefore,we can have a particular mission payload. As our main task is to execute reconnaissance mission,we will emphasize on the character of long-endurance. 2.2.Target design parameters We have the following design parameters fixed referring to the RQ-4AA global hawk: Cruising altitude:18000 m Cruising speed:640 km/h Endurance time:42h Largest mission payload:700 kg(will be figured out in the following context) -11-
HALE UAV DESIGN - 11 - 2. Design requirements In this chapter our design requirements will be determined based on our marketing. And we choose RQ-4A as our reference standard. 2.1. Main goal From what has been investigated, HALE UAV is playing a more and more important role. The HALE UAV is mainly used to carry out high reconnaissance, besides it can be used in airborne early warning, communications relay, electronic jamming and head off theater ballistic missiles, etc. Compared with reconnaissance satellite, the HALE UAV has its own features: lower cost than satellites, generally several tenths of that of satellite; and while executing missions, it can carry out continuous surveillance and collection of complete electronic communication information in selected target area according to the commanders’ intend, while satellite can only round the earth according to its pre-set orbit. What’s more, with lower altitude, UAV has fine resolution to the ground object. So our goal is to design a HALE UAV with long endurance and high reliability. HALE UAV requires long endurance and long range. To low-speed UAV, endurance should be more than 24h. To high-speed UAV, voyage should have more than ten thousand meters voyage. Generally speaking, the airborne devices should have high reliability and a long continuous working time without failures. What’s more, considering the energy consumption, the devices would have little redundancy. The task of our HALE UAV is mainly high reconnaissance and communications relay, in which different airborne devices are required. We will concentrate on finding these task loads in the following context, and we find that different task loads don’t vary too much. Therefore, we can have a particular mission payload. As our main task is to execute reconnaissance mission, we will emphasize on the character of long-endurance. 2.2. Target design parameters We have the following design parameters fixed referring to the RQ-4AA global hawk: Cruising altitude: 18000 m Cruising speed: 640 km/h Endurance time: 42h Largest mission payload: 700 kg (will be figured out in the following context)
上海文夏大¥ IANGHAI JIAO TONG UNIVERSITY HALE UAV DESIGN 3.Payload Analysis The mission system of HALE UAV consists of airborne mission system and ground control system.And it is the key point of executing reconnaissance, surveillance and some other missions successfully for UAV.Since we are trying to figure out the payload of the UAV,we concentrate on the airborne mission system and find out the mission payload.The airborne mission system is consisting of integrated sensor system(ISS),navigation system,airborne communication system,assistance defense system and so on. 3.1.Integrated sensor system We plan to choose an integrated sensor system integrating several sensors component such as the synthetic aperture radar(SAR)and the electro-optical (EO)and third-generation infrared sensor system(IR).It aims at providing commanders a high-resolution,near-real-time image so that they can make the best strategic decision according to the battlefield situation. Each of the sensors provides wide area search imagery and a high-resolution spot mode.The SAR has a ground moving target indicator(GMTI)mode,which can provide a text message providing the moving target's position and velocity. The feature of the ISS is that it replaces the single reconnaissance equipment. The integrated system has a small total weight,small volume,and better performance.What's more,operator can choose different sensor or use them all in different mission scenarios. 3.2.Navigation system The GPS/INS integrated navigation is widely used in UAV navigation system. We plan to choose this integrated system in our design. INS or Inertial Navigation System is a self-aid navigation system which neither rely on external information nor radiate energy to the surroundings.Its working environment can be high-altitude air,ground and even the water.INS is based on the Newton's laws,which acquires the information of speed,yaw angle and position by measuring acceleration in the inertial coordinate system,integrating it and transforming it to the navigation coordinate system. GPS is also called global positioning system.It is a space-based satellite navigation system that provides location and time information in all weather conditions,anywhere on or near the earth where there is an unobstructed line of sight to four or more GPS satellites.The system provides critical capabilities to military,civil,and commercial users around the world. -12-
HALE UAV DESIGN - 12 - 3. Payload Analysis The mission system of HALE UAV consists of airborne mission system and ground control system. And it is the key point of executing reconnaissance, surveillance and some other missions successfully for UAV. Since we are trying to figure out the payload of the UAV, we concentrate on the airborne mission system and find out the mission payload. The airborne mission system is consisting of integrated sensor system (ISS), navigation system, airborne communication system, assistance defense system and so on. 3.1. Integrated sensor system We plan to choose an integrated sensor system integrating several sensors component such as the synthetic aperture radar (SAR) and the electro-optical (EO) and third-generation infrared sensor system (IR). It aims at providing commanders a high-resolution, near-real-time image so that they can make the best strategic decision according to the battlefield situation. Each of the sensors provides wide area search imagery and a high-resolution spot mode. The SAR has a ground moving target indicator (GMTI) mode, which can provide a text message providing the moving target's position and velocity. The feature of the ISS is that it replaces the single reconnaissance equipment. The integrated system has a small total weight, small volume, and better performance. What’s more, operator can choose different sensor or use them all in different mission scenarios. 3.2. Navigation system The GPS/INS integrated navigation is widely used in UAV navigation system. We plan to choose this integrated system in our design. INS or Inertial Navigation System is a self-aid navigation system which neither rely on external information nor radiate energy to the surroundings. Its working environment can be high-altitude air, ground and even the water. INS is based on the Newton’s laws, which acquires the information of speed, yaw angle and position by measuring acceleration in the inertial coordinate system, integrating it and transforming it to the navigation coordinate system. GPS is also called global positioning system. It is a space-based satellite navigation system that provides location and time information in all weather conditions, anywhere on or near the earth where there is an unobstructed line of sight to four or more GPS satellites. The system provides critical capabilities to military, civil, and commercial users around the world
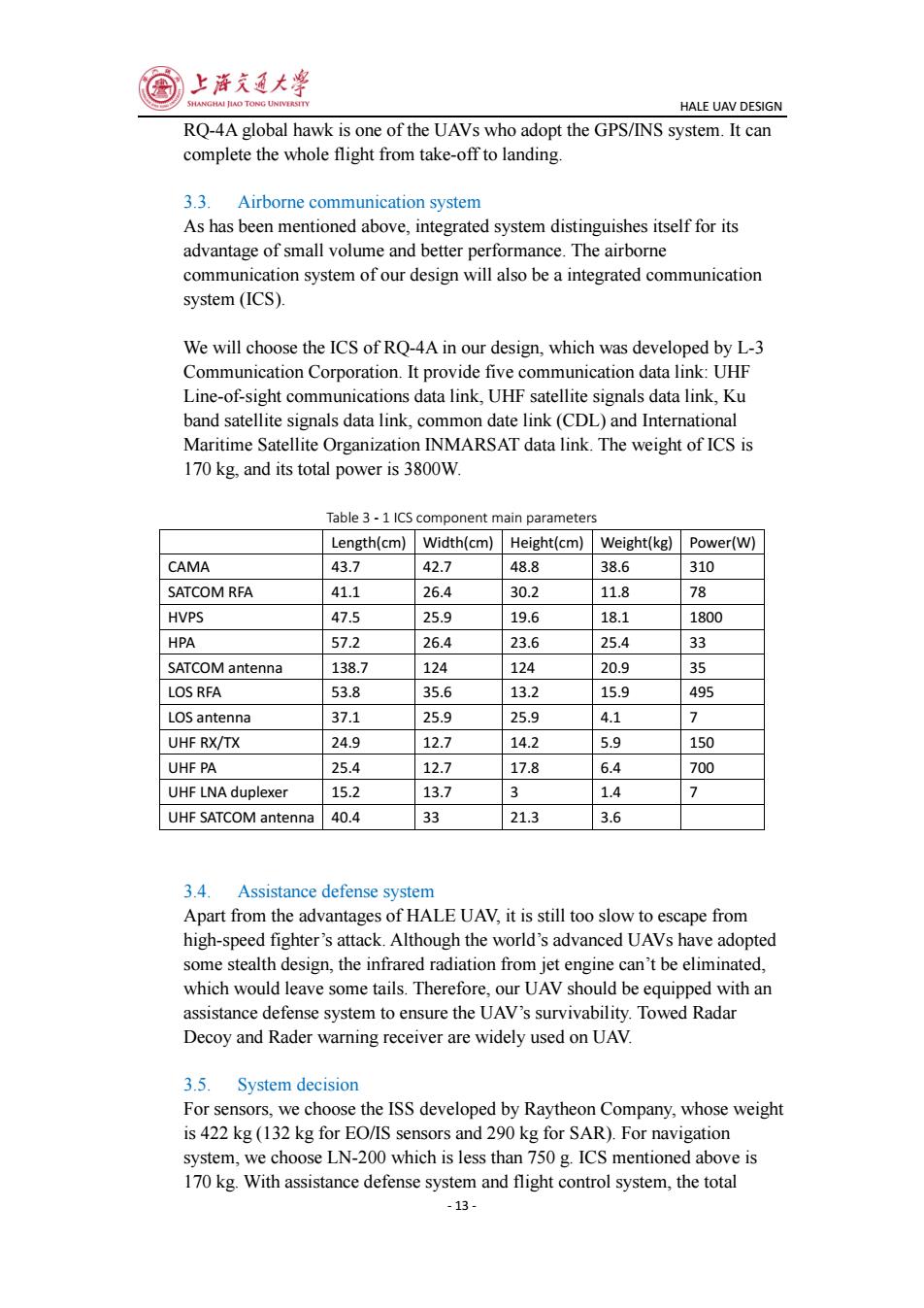
上游夏大学 SHANGHAI JIAO TONG UNIVERSITY HALE UAV DESIGN RQ-4A global hawk is one of the UAVs who adopt the GPS/INS system.It can complete the whole flight from take-off to landing. 3.3.Airborne communication system As has been mentioned above,integrated system distinguishes itself for its advantage of small volume and better performance.The airborne communication system of our design will also be a integrated communication system (ICS). We will choose the ICS of RQ-4A in our design,which was developed by L-3 Communication Corporation.It provide five communication data link:UHF Line-of-sight communications data link,UHF satellite signals data link,Ku band satellite signals data link,common date link(CDL)and International Maritime Satellite Organization INMARSAT data link.The weight of ICS is 170 kg,and its total power is 3800W Table 3-1 ICS component main parameters Length(cm)Width(cm) Height(cm) Weight(kg) Power(W) CAMA 43.7 42.7 48.8 38.6 310 SATCOM RFA 41.1 26.4 30.2 11.8 78 HVPS 47.5 25.9 19.6 18.1 1800 HPA 57.2 26.4 23.6 25.4 33 SATCOM antenna 138.7 124 124 20.9 35 LOS RFA 53.8 35.6 13.2 15.9 495 LOS antenna 37.1 25.9 25.9 4.1 7 UHF RX/TX 24.9 12.7 14.2 5.9 150 UHF PA 25.4 12.7 17.8 6.4 700 UHF LNA duplexer 15.2 13.7 J 1.4 > UHF SATCOM antenna 40.4 33 21.3 3.6 3.4.Assistance defense system Apart from the advantages of HALE UAV,it is still too slow to escape from high-speed fighter's attack.Although the world's advanced UAVs have adopted some stealth design,the infrared radiation from jet engine can't be eliminated, which would leave some tails.Therefore,our UAV should be equipped with an assistance defense system to ensure the UAV's survivability.Towed Radar Decoy and Rader warning receiver are widely used on UAV. 3.5.System decision For sensors,we choose the ISS developed by Raytheon Company,whose weight is 422 kg(132 kg for EO/IS sensors and 290 kg for SAR).For navigation system,we choose LN-200 which is less than 750 g.ICS mentioned above is 170 kg.With assistance defense system and flight control system,the total -13-
HALE UAV DESIGN - 13 - RQ-4A global hawk is one of the UAVs who adopt the GPS/INS system. It can complete the whole flight from take-off to landing. 3.3. Airborne communication system As has been mentioned above, integrated system distinguishes itself for its advantage of small volume and better performance. The airborne communication system of our design will also be a integrated communication system (ICS). We will choose the ICS of RQ-4A in our design, which was developed by L-3 Communication Corporation. It provide five communication data link: UHF Line-of-sight communications data link, UHF satellite signals data link, Ku band satellite signals data link, common date link (CDL) and International Maritime Satellite Organization INMARSAT data link. The weight of ICS is 170 kg, and its total power is 3800W. Table 3 - 1 ICS component main parameters Length(cm) Width(cm) Height(cm) Weight(kg) Power(W) CAMA 43.7 42.7 48.8 38.6 310 SATCOM RFA 41.1 26.4 30.2 11.8 78 HVPS 47.5 25.9 19.6 18.1 1800 HPA 57.2 26.4 23.6 25.4 33 SATCOM antenna 138.7 124 124 20.9 35 LOS RFA 53.8 35.6 13.2 15.9 495 LOS antenna 37.1 25.9 25.9 4.1 7 UHF RX/TX 24.9 12.7 14.2 5.9 150 UHF PA 25.4 12.7 17.8 6.4 700 UHF LNA duplexer 15.2 13.7 3 1.4 7 UHF SATCOM antenna 40.4 33 21.3 3.6 3.4. Assistance defense system Apart from the advantages of HALE UAV, it is still too slow to escape from high-speed fighter’s attack. Although the world’s advanced UAVs have adopted some stealth design, the infrared radiation from jet engine can’t be eliminated, which would leave some tails. Therefore, our UAV should be equipped with an assistance defense system to ensure the UAV’s survivability. Towed Radar Decoy and Rader warning receiver are widely used on UAV. 3.5. System decision For sensors, we choose the ISS developed by Raytheon Company, whose weight is 422 kg (132 kg for EO/IS sensors and 290 kg for SAR). For navigation system, we choose LN-200 which is less than 750 g. ICS mentioned above is 170 kg. With assistance defense system and flight control system, the total

@上清文豆大学 SHANGHAI JIAO TONG UNIVERSITY HALE UAV DESIGN payload will come to 700 kg.What's more,if the UAV are assigned with the communication rely mission,we replace ISS with ANS rely communication device whose weight is 408 kg,developed by DARPA.Therefore,the payload does not change too much in two missions. All in all,our UAV's design payload is 700 kg. -14-
HALE UAV DESIGN - 14 - payload will come to 700 kg. What’s more, if the UAV are assigned with the communication rely mission, we replace ISS with ANS rely communication device whose weight is 408 kg, developed by DARPA. Therefore, the payload does not change too much in two missions. All in all, our UAV’s design payload is 700 kg

上海文夏大学 SHANGHAI JIAO TONG UNIVERSITY HALE UAV DESIGN 4.Primary weight estimation 4.1. Take-off weight analysis The take-off weight(Wro)is a significant design parameter during the initial design progress.It is directly concerned with the thrust selecting and wing area selecting. Wro components is different due to different category of airplane.Here considering UAV,WTo consists of items below: WoE:remaining weight (empty weight) WPL:payload weight(for UAV,mission payload) ●We:fuel weight Which can be express into: WIO=WPL +WOE +WE Converting it,we can get: WTo= WPL 1- WE WOE Wto Wio uisremining where Wro Wro From the design requirement,WPL is 700kg.This is an iterative formula,which will be used later. 4.2.Take-off weight estimation method From above,we know it is an iterative progress to calculate Wro: 1.Calculate WPL from design requirement. 2.Guess a take-off weight Wro_GUEss 3.Calculate Wr/WTo 4. Calculate WoE/WTo 5.Substitute the values above into equation above,figure Wro out. 6.Compare Wro and Wro GuEss,if the error is not acceptable,repeat procedure 2-5 till we get a suited Wro. This progress can also be graphically represented as below: -15-
HALE UAV DESIGN - 15 - 4. Primary weight estimation 4.1. Take-off weight analysis The take-off weight (WTO) is a significant design parameter during the initial design progress. It is directly concerned with the thrust selecting and wing area selecting. WTO components is different due to different category of airplane. Here considering UAV, WTO consists of items below: WOE: remaining weight (empty weight) WPL: payload weight(for UAV, mission payload) WF: fuel weight Which can be express into: W W W W TO PL OE F Converting it, we can get: 1 PL TO F OE TO TO W W W W W W where F TO W W is fuel weight ratio, OE TO W W is remaining weight ratio. From the design requirement, WPL is 700kg. This is an iterative formula, which will be used later. 4.2. Take-off weight estimation method From above, we know it is an iterative progress to calculate WTO: 1. Calculate WPL from design requirement. 2. Guess a take-off weight WTO_GUESS 3. Calculate WF/WTO 4. Calculate WOE/WTO 5. Substitute the values above into equation above, figure WTO out. 6. Compare WTO and WTO_GUESS, if the error is not acceptable, repeat procedure 2-5 till we get a suited WTO. This progress can also be graphically represented as below: