图4测量系统零点测量界面和数据处理界面 数据采集时可以根据试验的要求,选择不同的通道数、每秒钟采集次数和采 样时间,测量数据经处理和统计后可以分别显示每路传感器在设定采样时间内测 量的平均波高、波数、最大波、次大波、4%大波和13%大波等,也可以分别显 示每路传感器测量的数据和曲线图像,曲线图像可根据试验需要,选择单路或多 路显示,也可放大1~7倍显示。在浪高数据处理中,有阀值设定和调节功能, 可根据浪高数据测量和处理的需要,设定不同的阀值。 2.力的测量 在海岸工程试验中,为探求水力因素与建筑物相互作用,需进行力的测量。 测力方法可以分为机械式测力机构和电子测力系统,在海上动力因素研究中,主 要采用电子测力系统。 电子测力系统一般包括三部分:测力传感器、放大器及调平部分即动态电阻 应变仪、记录仪器。 目前采用先进的电子技术、传感技术、计算机集一体的测力系统很多。《CSW Ⅱ型压强和总力测量系统》(图5)是采用先进的电子技术、传感技术和计算机 硬、软件技术最新研制成功的计算机多点同步测量系统,系统可同步采集处理 27点压强(也可扩充同步采集81点压强)和27点总力,系统设计有先进的硬件 调零功能和硬件放大倍数调节功能。 图5CSW-Ⅱ型压强和总力测量系统 测量系统软件界面设计为按钮控制的主菜单模式,具有常系数建立、传感器 自检、零点测量、压力测量、压力处理、总力测量、总力处理等功能,界面美观 新颖,具有很强的可视性和交互性(见图6)。 -6
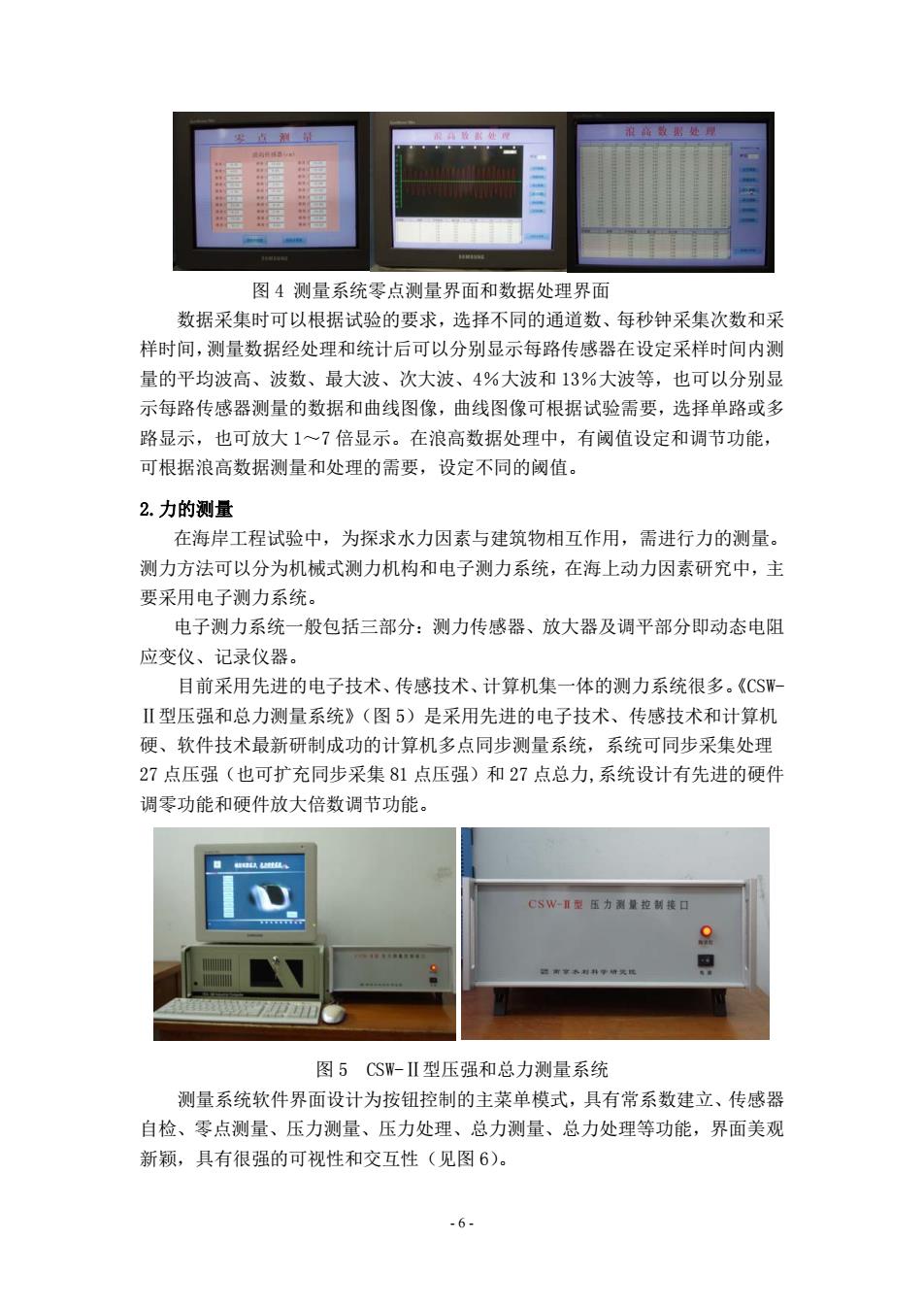
- 6 - 图 4 测量系统零点测量界面和数据处理界面 数据采集时可以根据试验的要求,选择不同的通道数、每秒钟采集次数和采 样时间,测量数据经处理和统计后可以分别显示每路传感器在设定采样时间内测 量的平均波高、波数、最大波、次大波、4%大波和 13%大波等,也可以分别显 示每路传感器测量的数据和曲线图像,曲线图像可根据试验需要,选择单路或多 路显示,也可放大 1~7 倍显示。在浪高数据处理中,有阈值设定和调节功能, 可根据浪高数据测量和处理的需要,设定不同的阈值。 2.力的测量 在海岸工程试验中,为探求水力因素与建筑物相互作用,需进行力的测量。 测力方法可以分为机械式测力机构和电子测力系统,在海上动力因素研究中,主 要采用电子测力系统。 电子测力系统一般包括三部分:测力传感器、放大器及调平部分即动态电阻 应变仪、记录仪器。 目前采用先进的电子技术、传感技术、计算机集一体的测力系统很多。《CSW- Ⅱ型压强和总力测量系统》(图 5)是采用先进的电子技术、传感技术和计算机 硬、软件技术最新研制成功的计算机多点同步测量系统,系统可同步采集处理 27 点压强(也可扩充同步采集 81 点压强)和 27 点总力,系统设计有先进的硬件 调零功能和硬件放大倍数调节功能。 图 5 CSW-Ⅱ型压强和总力测量系统 测量系统软件界面设计为按钮控制的主菜单模式,具有常系数建立、传感器 自检、零点测量、压力测量、压力处理、总力测量、总力处理等功能,界面美观 新颖,具有很强的可视性和交互性(见图 6)

测量系统具有丰富的自检自诊断功能,可以静态地检测每路传感器的输出信 号,也可以动态地检测和显示每路测量信号的数据和跟踪曲线。数据采集时可以 根据试验的要求,选择不同的通道数、每秒钟采集次数和采样时间,测量数据经 拟合平滑处理后显示处理前后的数据和多路曲线图像。曲线图像可根据试验需 要,选择单路或多路显示,也可放大1一7倍显示。 力处理 图6测量系统软件界面 3.流速测量 流速测量对研究流体中流速场的分布有着重要意义。在研究波浪与水流共同 作用时,也需要进行流速测量,研究防波堤或码头前沿护底的冲刷时,也要进行 流速测量。下面将在海岸工程模型试验中常用的几种测流速方法做一介绍。 (一)浮体追迹法 (1)表面浮子法 用于测水面流速。将纸屑或塑料粒(轻于水)放在水面上,测出流动的距离 △s和所需时间△1,则流速为u=△s/△1,可以用眼看,摄影和录像等方法记录△s 和1. (2)浮粒子法 用于水流流速不太高的试验中,在玻璃水槽中测底流速。要求浮子的比重必 须与水相近,而其色泽又区别于水,一般浮子可以用石蜡和橡皮泥混合做成,石 蜡比重小于1,橡皮泥比重大于1,做成小球,水流动时小球移动,用目测或摄 影记录小球移动距离s,所需时间1用秒表记或按波浪周期计算,则底流速 u=s/1. (二)热线一热膜流速仪 热线一热膜流速仪的工作原理是利用热电阻传感器的热损失来测量流速,测 量时将传感器置于流场中,流体使其冷却,利用传感器的瞬时热损失来测出流场 的瞬时速度。热线是由电阻温度系数很高的钨、铂合成等材料制成,热膜则是在 石英丝或其它测器表面上镀一层金属(如铂)膜作为热电阻,金属通电后被加热 该体流动的强迫对流引起热损耗使之冷却,电阻发生变化,流速越大,线电阻变 .7
- 7 - 测量系统具有丰富的自检自诊断功能,可以静态地检测每路传感器的输出信 号,也可以动态地检测和显示每路测量信号的数据和跟踪曲线。数据采集时可以 根据试验的要求,选择不同的通道数、每秒钟采集次数和采样时间,测量数据经 拟合平滑处理后显示处理前后的数据和多路曲线图像。曲线图像可根据试验需 要,选择单路或多路显示,也可放大 1~7 倍显示。 图 图 6 测量系统软件界面 3.流速测量 流速测量对研究流体中流速场的分布有着重要意义。在研究波浪与水流共同 作用时,也需要进行流速测量,研究防波堤或码头前沿护底的冲刷时,也要进行 流速测量。下面将在海岸工程模型试验中常用的几种测流速方法做一介绍。 (一)浮体追迹法 (1)表面浮子法 用于测水面流速。将纸屑或塑料粒(轻于水)放在水面上,测出流动的距离 Δs 和所需时间Δt ,则流速为u = Δs / Δt ,可以用眼看,摄影和录像等方法记录Δs 和Δt 。 (2)浮粒子法 用于水流流速不太高的试验中,在玻璃水槽中测底流速。要求浮子的比重必 须与水相近,而其色泽又区别于水,一般浮子可以用石蜡和橡皮泥混合做成,石 蜡比重小于 1,橡皮泥比重大于 1,做成小球,水流动时小球移动,用目测或摄 影记录小球移动距离s ,所需时间t 用秒表记或按波浪周期计算,则底流速 u = s/ t 。 (二)热线—热膜流速仪 热线—热膜流速仪的工作原理是利用热电阻传感器的热损失来测量流速,测 量时将传感器置于流场中,流体使其冷却,利用传感器的瞬时热损失来测出流场 的瞬时速度。热线是由电阻温度系数很高的钨、铂合成等材料制成,热膜则是在 石英丝或其它测器表面上镀一层金属(如铂)膜作为热电阻,金属通电后被加热, 该体流动的强迫对流引起热损耗使之冷却,电阻发生变化,流速越大,线电阻变
化越大。测出线电阻的变化,就可求得流速的大小。 热线一热膜流速仪它的传感器小,对流场干扰不大,而且灵敏度高,对流速 脉动的频率响应高,能同时测出多维速度分量。但它对水质有较高的要求,必须 清洁无杂质,否则由于杂质沉淀在传感器表面,则造成测量误差。 (三)旋浆流速仪 目前旋浆流速仪品种较多,水力试验中用的也较广。《LGY一Ⅲ型多功能智能 流速仪》是采用先进的电子技术、传感技术和计算机硬、软件技术最新研制成功 的一种多功能智能流速仪,内置CPU微处理器、存储器等,具有自检自诊断功能: 流速仪分为8路仪器和12路仪器两种,可根据实际需要选择,并随机配套8根 和12根新型流速旋浆传感器。流速仪可同步采集多点流速:可作为单机独立1 作,也可通过本机上的通讯接口与计算机连接,计算机可以控制单台或多台多功 能智能流速仪同步采集与处理,程序设计了动态的音视频效果。LGY一Ⅲ型多功 能智能流速仪配置了触摸式键盘,8位LED显示,性能好,精度高,寿命长,抗 干扰能力强。流速测量范围:1~200cm/s。 图7LGY一Ⅲ型多功能智能流速仪 该传感器是采用先进的技术研制而成,旋浆螺旋角、螺距、制作工艺和材料 等都进行了重新设计,旋浆直径分别为④15m和Φ12mm(旋浆反光面采用先进的 电镀工艺,耐磨损,信号强),起动流速≤lcm/s,起动流速、测速范围、线性 度、同心度和均方差等指标均较以往传感器有很大的改进和提高。 (四)声学多普勒流速仪 20世纪70年代随着集成电路IC技术的迅速发展,声学多普勒流速仪得到 实际应用,如今已广泛应用于水力及海洋实验室的流速测量, 声学多普勒流速仪能直接测量三维流速,对水流干扰小、测量精度高、无需 率定、操作简便、流速资料后处理功能强,极具推广应用前景。声学多普勒流速 仪一般由传感器、信号调理、信号处理三个部分组成。传感器由3个10MHz的 接收探头和一个发射探头组成,3个接收探头分布在发射探头轴线的周围,它们 之间的夹角为120°,接收探头与采样体的连线与发射探头轴线之间的夹角为30°, 采样体位于探头下方5cm,这样可以基本上消除探头对水流的干扰。图8为超声 8
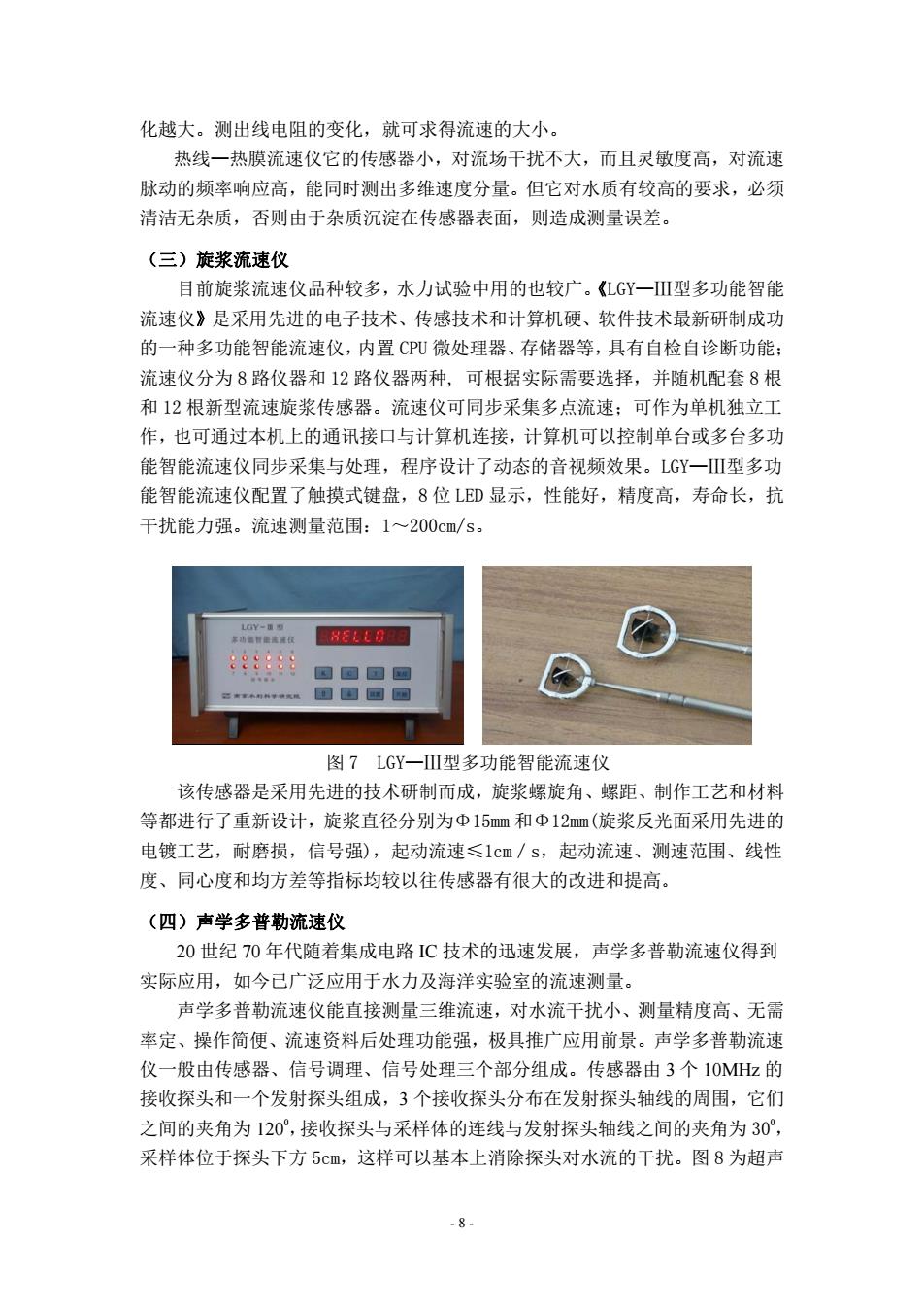
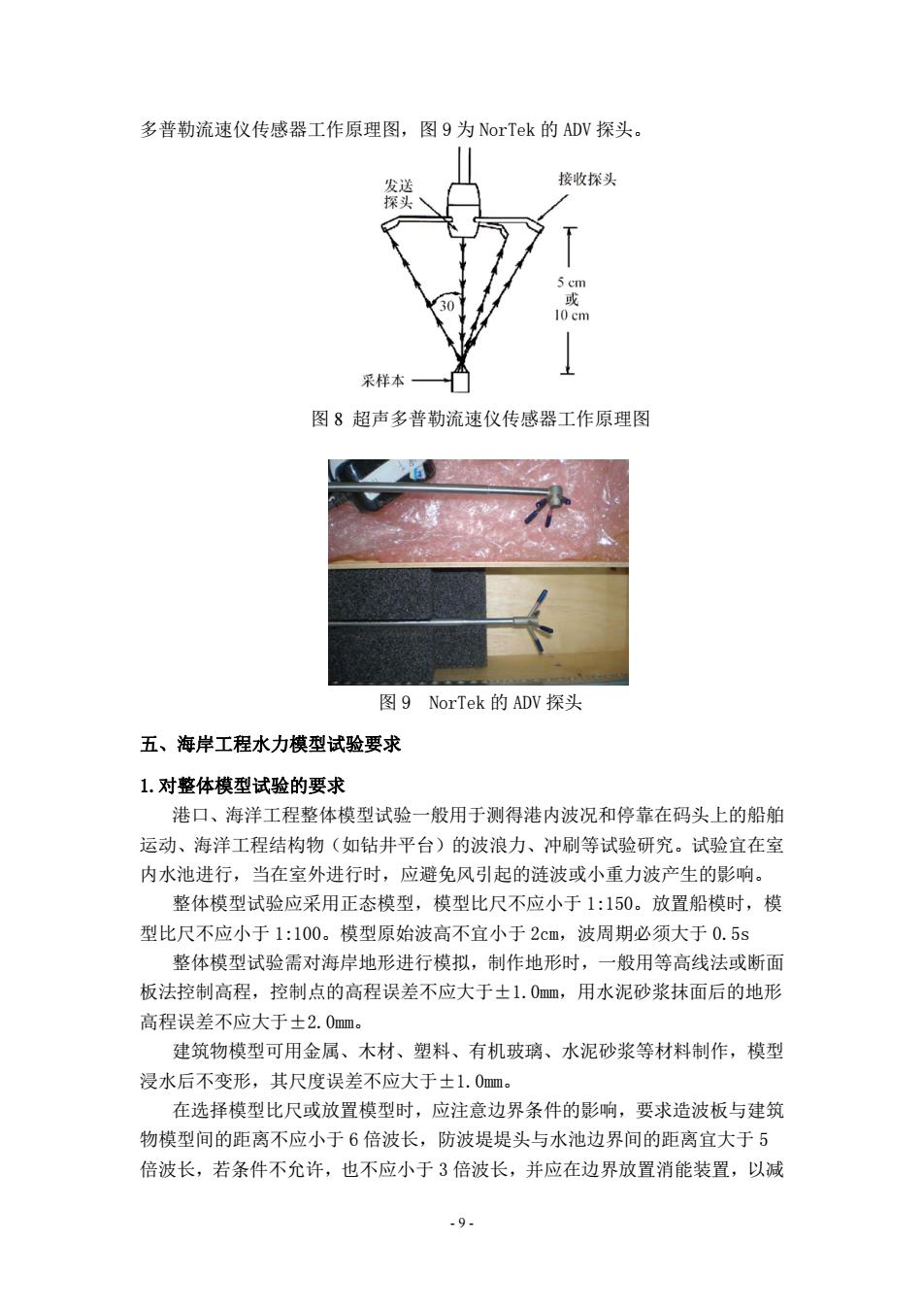
- 8 - 化越大。测出线电阻的变化,就可求得流速的大小。 热线—热膜流速仪它的传感器小,对流场干扰不大,而且灵敏度高,对流速 脉动的频率响应高,能同时测出多维速度分量。但它对水质有较高的要求,必须 清洁无杂质,否则由于杂质沉淀在传感器表面,则造成测量误差。 (三)旋浆流速仪 目前旋浆流速仪品种较多,水力试验中用的也较广。《LGY—Ⅲ型多功能智能 流速仪》是采用先进的电子技术、传感技术和计算机硬、软件技术最新研制成功 的一种多功能智能流速仪,内置 CPU 微处理器、存储器等,具有自检自诊断功能; 流速仪分为 8 路仪器和 12 路仪器两种, 可根据实际需要选择,并随机配套 8 根 和 12 根新型流速旋浆传感器。流速仪可同步采集多点流速;可作为单机独立工 作,也可通过本机上的通讯接口与计算机连接,计算机可以控制单台或多台多功 能智能流速仪同步采集与处理,程序设计了动态的音视频效果。LGY—Ⅲ型多功 能智能流速仪配置了触摸式键盘,8 位 LED 显示,性能好,精度高,寿命长,抗 干扰能力强。流速测量范围:1~200cm/s。 图 7 LGY—Ⅲ型多功能智能流速仪 该传感器是采用先进的技术研制而成,旋浆螺旋角、螺距、制作工艺和材料 等都进行了重新设计,旋浆直径分别为Φ15mm 和Φ12mm(旋浆反光面采用先进的 电镀工艺,耐磨损,信号强),起动流速≤1cm/s,起动流速、测速范围、线性 度、同心度和均方差等指标均较以往传感器有很大的改进和提高。 (四)声学多普勒流速仪 20 世纪 70 年代随着集成电路 IC 技术的迅速发展,声学多普勒流速仪得到 实际应用,如今已广泛应用于水力及海洋实验室的流速测量。 声学多普勒流速仪能直接测量三维流速,对水流干扰小、测量精度高、无需 率定、操作简便、流速资料后处理功能强,极具推广应用前景。声学多普勒流速 仪一般由传感器、信号调理、信号处理三个部分组成。传感器由 3 个 10MHz 的 接收探头和一个发射探头组成,3 个接收探头分布在发射探头轴线的周围,它们 之间的夹角为 1200 ,接收探头与采样体的连线与发射探头轴线之间的夹角为 300 , 采样体位于探头下方 5cm,这样可以基本上消除探头对水流的干扰。图 8 为超声
多普勒流速仪传感器工作原理图,图9为NorTek的ADV探头。 接收探头 采样本一 图8超声多普勒流速仪传感器工作原理图 图9 NorTek的ADV探头 五、海岸工程水力模型试验要求 1.对整体模型试验的要求 港口、海洋工程整体模型试验一般用于测得港内波况和停靠在码头上的船舶 运动、海洋工程结构物(如钻井平台)的波浪力、冲刷等试验研究。试验宜在室 内水池进行,当在室外进行时,应避免风引起的涟波或小重力波产生的影响。 整体模型试验应采用正态模型,模型比尺不应小于1:150。放置船模时,模 型比尺不应小于1:100。模型原始波高不宜小于2cm,波周期必须大于0.5s 整体模型试验需对海岸地形进行模拟,制作地形时,一般用等高线法或断面 板法控制高程,控制点的高程误差不应大于士1.0m皿,用水泥砂浆抹面后的地形 高程误差不应大于±2.0mm。 建筑物模型可用金属、木材、塑料、有机玻璃、水泥砂浆等材料制作,模型 浸水后不变形,其尺度误差不应大于±1.0mm, 在选择模型比尺或放置模型时,应注意边界条件的影响,要求造波板与建筑 物模型间的距离不应小于6倍波长,防波堤堤头与水池边界间的距离宜大于5 倍波长,若条件不允许,也不应小于3倍波长,并应在边界放置消能装置,以减 9
- 9 - 多普勒流速仪传感器工作原理图,图 9 为 NorTek 的 ADV 探头。 图 8 超声多普勒流速仪传感器工作原理图 图 9 NorTek 的 ADV 探头 五、海岸工程水力模型试验要求 1.对整体模型试验的要求 港口、海洋工程整体模型试验一般用于测得港内波况和停靠在码头上的船舶 运动、海洋工程结构物(如钻井平台)的波浪力、冲刷等试验研究。试验宜在室 内水池进行,当在室外进行时,应避免风引起的涟波或小重力波产生的影响。 整体模型试验应采用正态模型,模型比尺不应小于 1:150。放置船模时,模 型比尺不应小于 1:100。模型原始波高不宜小于 2cm,波周期必须大于 0.5s 整体模型试验需对海岸地形进行模拟,制作地形时,一般用等高线法或断面 板法控制高程,控制点的高程误差不应大于±1.0mm,用水泥砂浆抹面后的地形 高程误差不应大于±2.0mm。 建筑物模型可用金属、木材、塑料、有机玻璃、水泥砂浆等材料制作,模型 浸水后不变形,其尺度误差不应大于±1.0mm。 在选择模型比尺或放置模型时,应注意边界条件的影响,要求造波板与建筑 物模型间的距离不应小于 6 倍波长,防波堤堤头与水池边界间的距离宜大于 5 倍波长,若条件不允许,也不应小于 3 倍波长,并应在边界放置消能装置,以减
少反射波的影响。 测波点一般设在码头前0.5倍船宽处,每个泊位不应少于1点,测点间距不 应小于20℃m。原始波在各控制点的波高平均值与模型试验要求的波高值间的误 差不应大于5%。 港内平稳度一般用比波高或绝对波高表示。比波高为港内各测点实测波高与 口门处实测波高的比值。 2.对斜坡堤断面模型试验的要求 斜坡堤断面试验应采用正态模型,模型比尺不应小于1:40。造波板与建筑物 模型间的距离不应小于6倍波长。 试验断面的护面块体和胸墙模型的几何尺寸、总重和重心位置等均应与原型 相似,其尺度误差不应大于士1.0mm,重量误差不应大于土3%。 规则波的模型试验应采用间断造波的方法,当二次反射波到达建筑物前应立 即停止测试,待水面平稳后,再进行造波,对无缓启动和缓停机功能的造波机, 应注意排除启动和停机产生的个别大波的影响。 护面块体和块块的整体稳定试验,应先用小波连续作用一段时间,待其自然 稳定后,再加大到设计波高进行正式试验。波浪累积作用时间应根据当地大浪持 续时间(一般为2~3小时)按时间比尺换算确定。护面块体单位面积抛放数应 符合设计要求,抛放条件应尽量于现场相符。在波浪作用下,护面块体的累积位 移达到块体的最大尺度时,即为失稳。护面块体的失稳率,一般按静水位上,下 一个波高范围内的失稳块数占该范围护面块体总数的百分比计算。失稳率超过规 定的容许失稳率时,即认为护面已破坏。 测定胸墙墙面波压力和底面浮托力分布,其测点数应根据胸墙尺度确定。也 可根据试验要求,只测其总压力和总浮托力。 斜坡堤的反射波高和反射系数可根据建筑物前实测的合成波高和标定的原 始波高算出,也可直接根据波腹和波节点的波高实测数据通过计算求得。 3.对直立堤断面模型试验的要求 模型可用金属、木材、有机玻璃等材料制作,模型比尺不应小于1:40,模型 在水槽中放置位置应满足距造波板的距离大于6倍波长的要求。 直立堤的模型设计、制作和尺度误差以及波浪作用时间,均可按斜坡堤断面 模型试验要求进行。 直立堤断面模型试验的主要内容是墙面波压力分布、底面浮托力分布或总波 压力,总浮托力以及堤前波浪反射系数、过水量、底冲刷等内容。有时也进行直 立堤的整体或局部的稳定试验。 规则波的波浪力试验,应测定累计30个以上的数据并取其平均值,但对冲 击波压力,除给出平均值外,尚应统计1/3大值、1/10大值和最大值等特征值。 .10
- 10 - 少反射波的影响。 测波点一般设在码头前 0.5 倍船宽处,每个泊位不应少于 1 点,测点间距不 应小于 20cm。原始波在各控制点的波高平均值与模型试验要求的波高值间的误 差不应大于 5%。 港内平稳度一般用比波高或绝对波高表示。比波高为港内各测点实测波高与 口门处实测波高的比值。 2.对斜坡堤断面模型试验的要求 斜坡堤断面试验应采用正态模型,模型比尺不应小于 1:40。造波板与建筑物 模型间的距离不应小于 6 倍波长。 试验断面的护面块体和胸墙模型的几何尺寸、总重和重心位置等均应与原型 相似,其尺度误差不应大于±1.0mm,重量误差不应大于±3%。 规则波的模型试验应采用间断造波的方法,当二次反射波到达建筑物前应立 即停止测试,待水面平稳后,再进行造波,对无缓启动和缓停机功能的造波机, 应注意排除启动和停机产生的个别大波的影响。 护面块体和块块的整体稳定试验,应先用小波连续作用一段时间,待其自然 稳定后,再加大到设计波高进行正式试验。波浪累积作用时间应根据当地大浪持 续时间(一般为 2~3 小时)按时间比尺换算确定。护面块体单位面积抛放数应 符合设计要求,抛放条件应尽量于现场相符。在波浪作用下,护面块体的累积位 移达到块体的最大尺度时,即为失稳。护面块体的失稳率,一般按静水位上,下 一个波高范围内的失稳块数占该范围护面块体总数的百分比计算。失稳率超过规 定的容许失稳率时,即认为护面已破坏。 测定胸墙墙面波压力和底面浮托力分布,其测点数应根据胸墙尺度确定。也 可根据试验要求,只测其总压力和总浮托力。 斜坡堤的反射波高和反射系数可根据建筑物前实测的合成波高和标定的原 始波高算出,也可直接根据波腹和波节点的波高实测数据通过计算求得。 3.对直立堤断面模型试验的要求 模型可用金属、木材、有机玻璃等材料制作,模型比尺不应小于 1:40,模型 在水槽中放置位置应满足距造波板的距离大于 6 倍波长的要求。 直立堤的模型设计、制作和尺度误差以及波浪作用时间,均可按斜坡堤断面 模型试验要求进行。 直立堤断面模型试验的主要内容是墙面波压力分布、底面浮托力分布或总波 压力,总浮托力以及堤前波浪反射系数、过水量、底冲刷等内容。有时也进行直 立堤的整体或局部的稳定试验。 规则波的波浪力试验,应测定累计 30 个以上的数据并取其平均值,但对冲 击波压力,除给出平均值外,尚应统计 1/3 大值、1/10 大值和最大值等特征值