(⑤)底片压平质量:压平质量由压平线进行检查,一般要求压平线弯曲不得大于 0.05-0.1mm ④遥感影像立体观察条件 在不同的摄影站,用同一焦距的航摄仪对同一地物进行摄影,得到两张像片,称作 立体像对,它是具有相同地物的一对影像。利用航片进行立体观察,必须满足下列 条件: 1)观察两张相邻的具有一定重叠的像对。 2)两眼分别同时各看一张像片。 3)像片安放时,相应点的连线必须与眼基线平行,且两像片间的距离要适中。 4)两张像片的比例尺尽可能一致,最大差值不宜超过16%。 ⑤SPOT卫星传感器及其影像的主要特点 SPOT卫星上装载的主要传感器HRV,是一种由CCD(电荷耦合器件)材料制成的线 阵列推扫式扫描仪。SPOT卫星上并排安装两台RV仪器,每台仪器视场宽度都为 60km,两者之间有3km的重叠,因此总的视场宽度为117km。赤道处相邻轨道间的 距离约为108km,垂直地面观测时,相邻轨道间的影像约有9km的重叠。 RV可绕卫星前进方向滚动轴旋转,侧视获取影像,从而实现不同轨道间的立 体观测。向左右两侧偏离垂直方向最大可达±27°,从天底点向轨道任意一侧可观 测到450km内的景物。每台RV的观察角最多可分91级,级间间隔为0.6° SPOT卫星的传感器HRV分成两种形式,多光谱(XS)和全色(PA)。多光谱 HRV分为三个波段,地面分辨率为20m,灰度等级分为2;全色RV地面分辨率为 10m,灰度等级分为2°。 5.分析计算(第1题10分,第2题5分) ①航空摄影像片投量影误差规律。 由于地面起伏,高于或低于基准面的地面点,在像片上的像点对于它在基准面 上的垂直投影点的像点所产生的直线位移,叫做投影误差。 (1)投影误差像点位移的路线和方向 由地面起伏引起的像点位移是在像点与像底点的连线上。当△h为正值时(即地面 点高于基准面),像点由原位置背离像底点方向移动,当△h为负值时(即地面点低 于基准面),像点则由原位置向着像底点方向移动。 (2)投影误差6h的计算公式 6h= △h· 式中:6h表示投影误差,r为像点至像底点的辐射距,△h为地物点相对基准面 的高差, H为基准面航高,由上式可可得 1)投影误差与辐射距成正比,即像点离像底点越远,投影误差越大,像片中心部位 投影误差小,像底点处不存在投影误差 2)投影误差与航高成反比,航高愈大,引起的像点位移愈小
(5)底片压平质量:压平质量由压平线进行检查,一般要求压平线弯曲不得大于 0.05-0.1mm。 ④遥感影像立体观察条件 在不同的摄影站,用同一焦距的航摄仪对同一地物进行摄影,得到两张像片,称作 立体像对,它是具有相同地物的一对影像。利用航片进行立体观察,必须满足下列 条件: 1)观察两张相邻的具有一定重叠的像对。 2)两眼分别同时各看一张像片。 3)像片安放时,相应点的连线必须与眼基线平行,且两像片间的距离要适中。 4)两张像片的比例尺尽可能一致,最大差值不宜超过 16%。 ⑤SPOT 卫星传感器及其影像的主要特点 SPOT 卫星上装载的主要传感器 HRV,是一种由 CCD(电荷耦合器件)材料制成的线 阵列推扫式扫描仪。SPOT 卫星上并排安装两台 HRV 仪器,每台仪器视场宽度都为 60km,两者之间有 3km 的重叠,因此总的视场宽度为 117km。赤道处相邻轨道间的 距离约为 108km,垂直地面观测时,相邻轨道间的影像约有 9km 的重叠。 HRV 可绕卫星前进方向滚动轴旋转,侧视获取影像,从而实现不同轨道间的立 体观测。向左右两侧偏离垂直方向最大可达±27°,从天底点向轨道任意一侧可观 测到 450km 内的景物。每台 HRV 的观察角最多可分 91 级,级间间隔为 0.6°。 SPOT 卫星的传感器 HRV 分成两种形式,多光谱(XS)和全色(PA)。多光谱 HRV 分为三个波段,地面分辨率为 20m,灰度等级分为 2 8;全色 HRV 地面分辨率为 10m,灰度等级分为 2 6。 5. 分析计算(第 1 题 10 分,第 2 题 5 分) ①航空摄影像片投影误差规律。 由于地面起伏,高于或低于基准面的地面点,在像片上的像点对于它在基准面 上的垂直投影点的像点所产生的直线位移,叫做投影误差。 (1)投影误差像点位移的路线和方向 由地面起伏引起的像点位移是在像点与像底点的连线上。当 Δh 为正值时(即地面 点高于基准面),像点由原位置背离像底点方向移动,当 Δh 为负值时(即地面点低 于基准面),像点则由原位置向着像底点方向移动。 (2)投影误差 δh的计算公式 δh= Δh· 式中:δh 表示投影误差,r为像点至像底点的辐射距,Δh 为地物点相对基准面 的高差, H为基准面航高,由上式可得: 1)投影误差与辐射距成正比,即像点离像底点越远,投影误差越大,像片中心部位 投影误差小,像底点处不存在投影误差。 2)投影误差与航高成反比,航高愈大,引起的像点位移愈小
3)投影误差与高差成正比,高差越大,投影差越大,反之就小。 ②己知:H,=2150m,ha=950m,Lo=291mm,La=219mmLb=231mm,求B点海拔高 度? 解:△h,=·L=·(2150-950)=·1200=-240(m) h=h+△h.=950-240=710(m) 答:B点海拔高度为710m 6.画图表示出日光下白、红、绿、蓝、黄、品红、青和黑色物体在如下所示的感 光片上的色彩再现过程(10分): 色彩再现过程:物体原色 曝光 显 影 漂 负片影像 物体原 曝光(3分) 显影(1.5 分) 漂定(1.5分) 负片影像(2分) 正片影像(2分) 物体原色:白、红、绿、蓝、黄、品红、青和黑色 负片 影像:黑、黄、背、品红、绿、红、蓝和白色 正片影像:白、蓝、红、绿、 品红、青、黄和黑色 黑红绿蓝黄品红青白 曝光 典
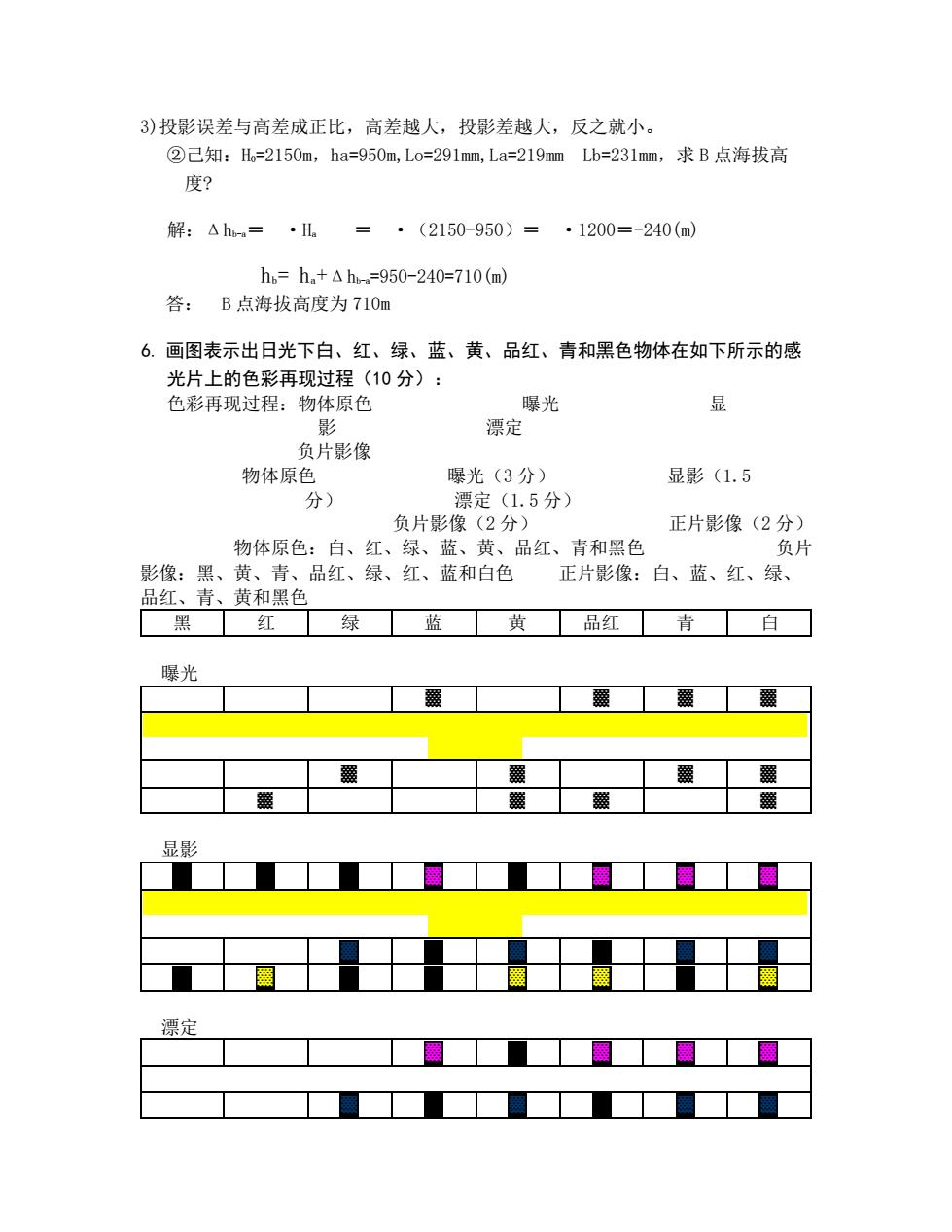
3)投影误差与高差成正比,高差越大,投影差越大,反之就小。 ②己知:H0=2150m,ha=950m,Lo=291mm,La=219mm Lb=231mm,求 B 点海拔高 度? 解:Δhb-a= ·Ha = ·(2150-950)= ·1200=-240(m) hb= ha+Δhb-a=950-240=710(m) 答: B 点海拔高度为 710m 6. 画图表示出日光下白、红、绿、蓝、黄、品红、青和黑色物体在如下所示的感 光片上的色彩再现过程(10 分): 色彩再现过程:物体原色 曝光 显 影 漂定 负片影像 物体原色 曝光(3 分) 显影(1.5 分) 漂定(1.5 分) 负片影像(2 分) 正片影像(2 分) 物体原色:白、红、绿、蓝、黄、品红、青和黑色 负片 影像:黑、黄、青、品红、绿、红、蓝和白色 正片影像:白、蓝、红、绿、 品红、青、黄和黑色 黑 红 绿 蓝 黄 品红 青 白 曝光 ▓ ▓ ▓ ▓ 12345678888888888888888888888888888888888888888888888888888888888888888 8888888888 ▓ ▓ ▓ ▓ ▓ ▓ ▓ ▓ 显影 ▓ ▓ ▓ ▓ 12345678888888888888888888888888888888888888888888888888888888888888888 8888888888 ▓ ▓ ▓ ▓ ▓ ▓ ▓ ▓ 漂定 ▓ ▓ ▓ ▓ ▓ ▓ ▓ ▓