
上游充通大学 SHANGHAI JLAO TONG UNIVERSITY 9.1PID控制方法 9.1.5比例积分PID控制 e(t) 0 c(t) 比例+积分 积分 微分 三种控制作用的对比曲线 11
11 9.1 PID控制方法 三种控制作用的对比曲线 9.1.5 比例积分(PI)控制
上游充通大学 9.1PID控制方法 SHANGHAI JLAO TONG UNIVERSITY 9.1.6比例积分微分PD)控制 PID控制的传递函数: 6n-克 输出信号和输入信号的关系: 0=kan+ar+元0) 12
12 9.1 PID控制方法 PID控制的传递函数: T s T s G s K d i c p 1 ( ) 1 输出信号和输入信号的关系: d t d e t e d T T u t K e t d t i p ( ) ( ) 1 ( ) ( ) 0 9.1.6 比例积分微分(PID)控制
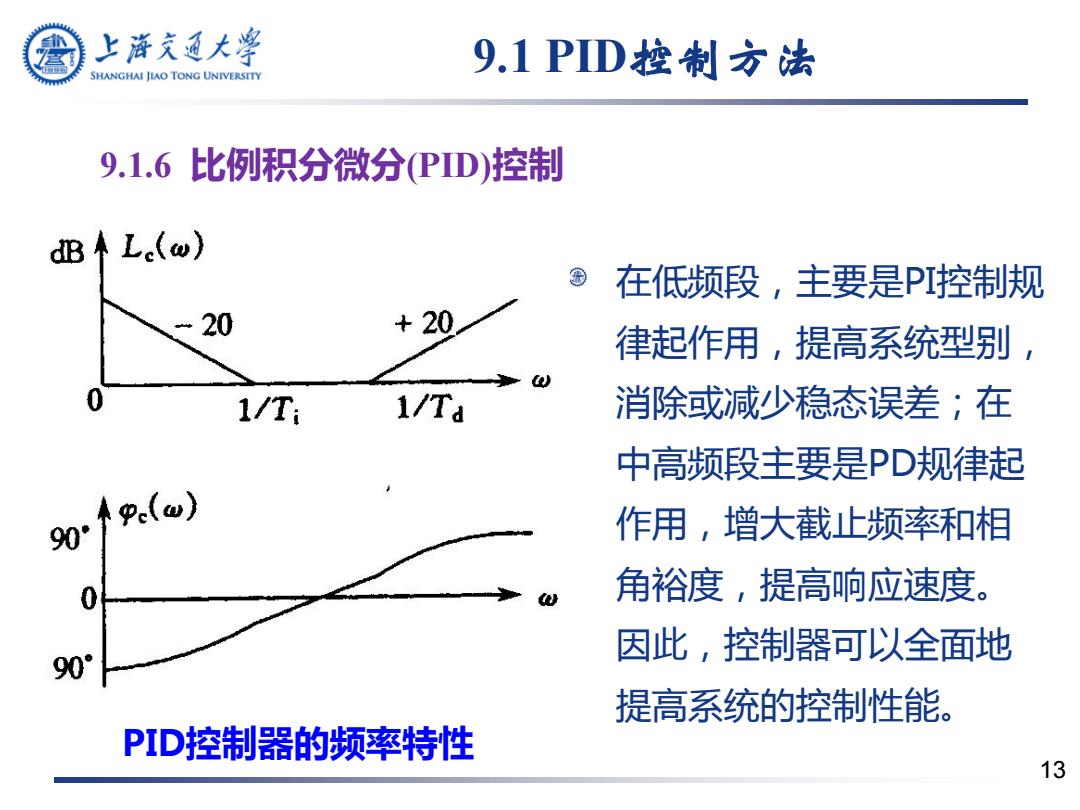
上浒充通大学 9.1PID控制方法 SHANGHAI JLAO TONG UNIVERSITY 9.1.6比例积分微分(PD)控制 B◆Lc(w) 在低频段,主要是PI控制规 -20 +20, 律起作用,提高系统型别, 1/T: 1/Ta 消除或减少稳态误差;在 中高频段主要是PD规律起 p(w) 90 作用,增大截止频率和相 角裕度,提高响应速度。 因此,控制器可以全面地 90° 提高系统的控制性能。 PID控制器的频率特性 13
13 9.1 PID控制方法 在低频段,主要是PI控制规 律起作用,提高系统型别, 消除或减少稳态误差;在 中高频段主要是PD规律起 作用,增大截止频率和相 角裕度,提高响应速度。 因此,控制器可以全面地 提高系统的控制性能。 PID控制器的频率特性 9.1.6 比例积分微分(PID)控制
上游充通大学 9.1PD控制方法 SHANGHAI JLAO TONG UNIVERSITY 数字PID控制算法 >用计算机实现PID控制,已不仅仅简单地把PID控制规 律数字化,而是与计算机的逻辑判断和运算功能进一 步结合起来,使PID控制更加灵活多样,更能满足生 产过程各式各样的要求。 >在连续生产过程计算机控制系统中,一般采用两种 PID控制算法: ① 含有理想微分的PID控制 ② 含有实际微分的PID控制 14
14 9.1 PID控制方法 数字PID控制算法 用计算机实现PID控制,已不仅仅简单地把PID控制规 律数字化,而是与计算机的逻辑判断和运算功能进一 步结合起来,使PID控制更加灵活多样,更能满足生 产过程各式各样的要求。 在连续生产过程计算机控制系统中,一般采用两种 PID控制算法: ① 含有理想微分的PID控制 ② 含有实际微分的PID控制
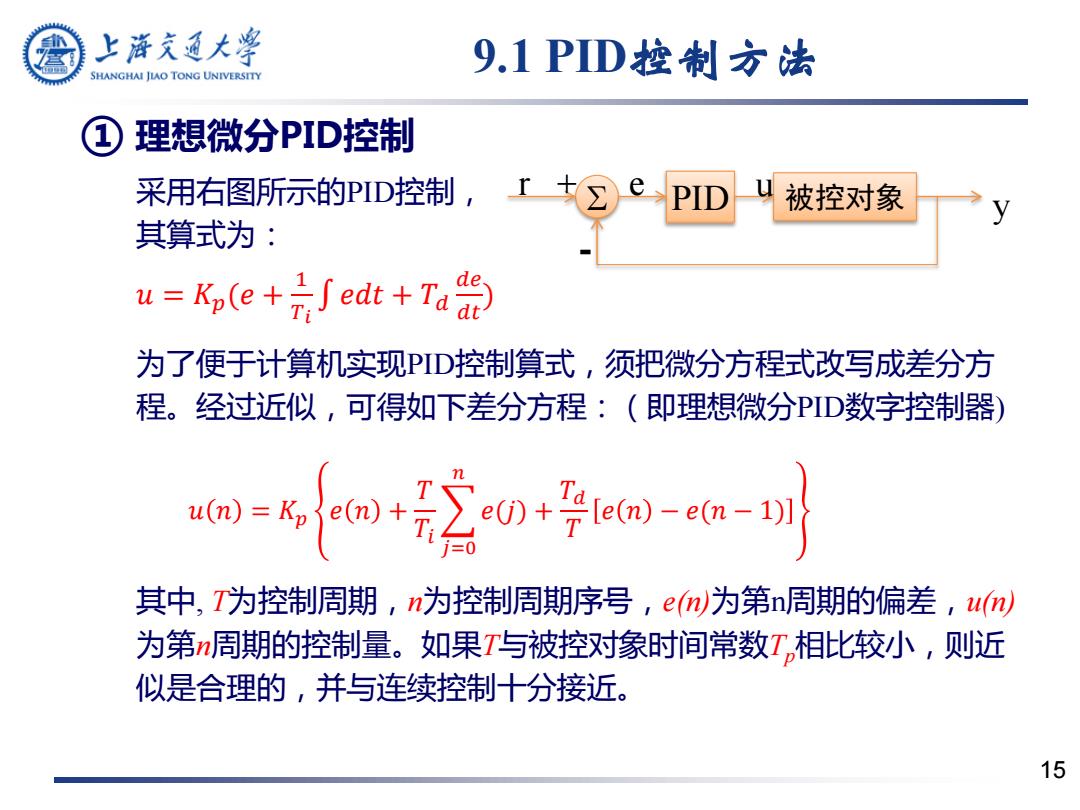
上游充通大学 9.1PID控制方法 SHANGHAI JLAO TONG UNIVERSITY 理想微分PID控制 采用右图所示的PID控制, PID 被控对象 其算式为: u=K,(e+∫edt+Ta de 为了便于计算机实现PD控制算式,须把微分方程式改写成差分方 程。经过近似,可得如下差分方程:(即理想微分PD数字控制器) ow-5ot2nnw-a-以 其中,T为控制周期,n为控制周期序号,en)为第n周期的偏差,u(n) 为第周期的控制量。如果T与被控对象时间常数T相比较小,则近 似是合理的,并与连续控制十分接近。 15
15 9.1 PID控制方法 ① 理想微分PID控制 采用右图所示的PID控制, 其算式为: 𝑢 = 𝐾𝑝(𝑒 + 1 𝑇𝑖 𝑒𝑑𝑡 + 𝑇𝑑 𝑑𝑒 𝑑𝑡 ) 为了便于计算机实现PID控制算式,须把微分方程式改写成差分方 程。经过近似,可得如下差分方程:(即理想微分PID数字控制器) 𝑢 𝑛 = 𝐾𝑝 𝑒 𝑛 + 𝑇 𝑇𝑖 𝑗=0 𝑛 𝑒(𝑗) + 𝑇𝑑 𝑇 𝑒 𝑛 − 𝑒(𝑛 − 1) 其中, T为控制周期,n为控制周期序号,e(n)为第n周期的偏差,u(n) 为第n周期的控制量。如果T与被控对象时间常数Tp相比较小,则近 似是合理的,并与连续控制十分接近。 r + PID 被控对象 - e u y