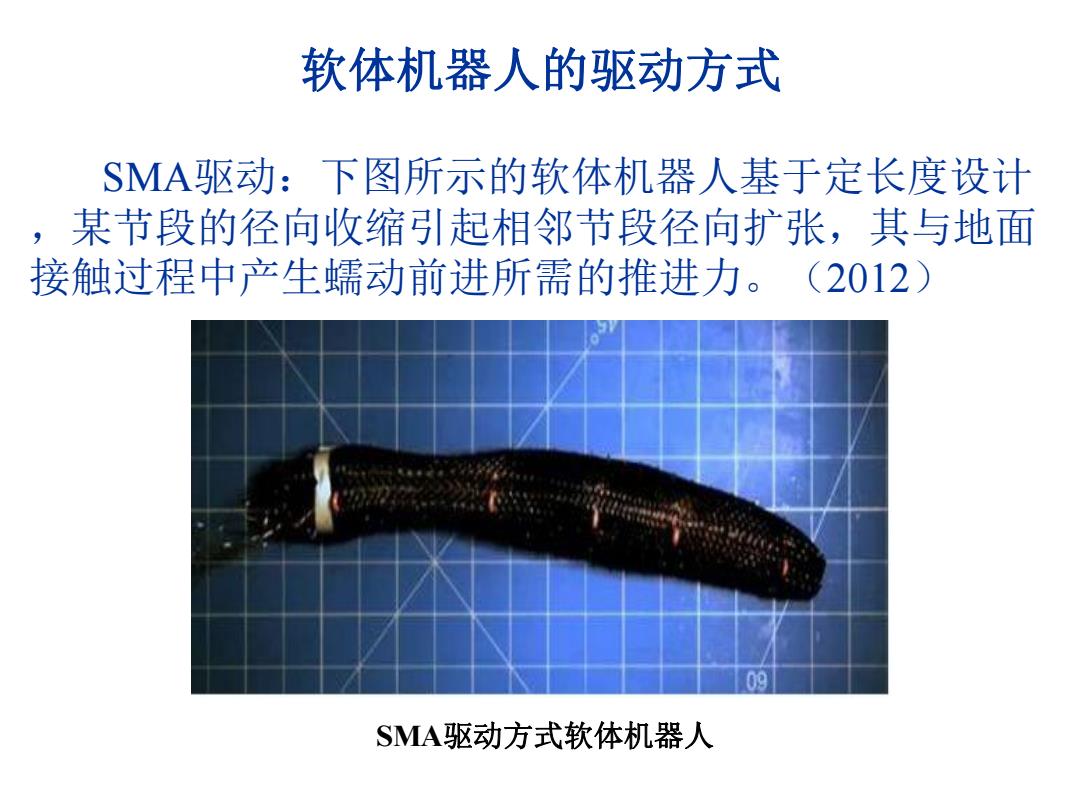
软体机器人的驱动方式 SMA驱动:下图所示的软体机器人基于定长度设计 ,某节段的径向收缩引起相邻节段径向扩张,其与地面 接触过程中产生蠕动前进所需的推进力。(2012) SMA驱动方式软体机器人
软体机器人的驱动方式 SMA驱动方式软体机器人 SMA驱动:下图所示的软体机器人基于定长度设计 ,某节段的径向收缩引起相邻节段径向扩张,其与地面 接触过程中产生蠕动前进所需的推进力。(2012)

软体机器人的驱动方式 气动一液压驱动:下图所示的气动软体机器人用 低压空气即可驱动,采用的最高气压为7psi(50.6625kPa )。(2011) 气动软体机器人
软体机器人的驱动方式 气动软体机器人 气动——液压驱动:下图所示的气动软体机器人用 低压空气即可驱动,采用的最高气压为7psi(50.6625kPa )。(2011)
软体机器人的驱动方式 电活性聚合物驱动 电活性聚合物(electroactive polymer,.EAP), 根据电活性聚合物的致动机理,可以将其分为电子型 和离子型两大类: ●电子型 ●离子型
软体机器人的驱动方式 电活性聚合物(electroactive polymer,EAP), 根据电活性聚合物的致动机理,可以将其分为电子型 和离子型两大类: l 电子型 l 离子型 电活性聚合物驱动

化学驱动 化学驱动方式是指利用化学反应将化学能转换成机 械能,从而驱动机器人运动。下图为哈佛大学,Robert F.Shepherd等最新研制的三足软体机器人(2013) 0 ms 1 ms 4m5 48m5 15 cm 77ms 119m5 287ms 368m5 三足软体机器人
化学驱动方式是指利用化学反应将化学能转换成机 械能,从而驱动机器人运动。下图为哈佛大学,Robert F. Shepherd等最新研制的三足软体机器人(2013) 化学驱动 三足软体机器人
软体机器人研究的关键技术和发展方向 关键技术:实现具有类似软体动物生物力学智能 特性的机器人,需要研制新型活性软质材料。 发展方向:制造在不同方向、不同范围压力作用 下具有不同机械特性的材料,将会为软体机器人 的非线性运动带来突破
软体机器人研究的关键技术和发展方向 l 关键技术:实现具有类似软体动物生物力学智能 特性的机器人,需要研制新型活性软质材料。 l 发展方向:制造在不同方向、不同范围压力作用 下具有不同机械特性的材料,将会为软体机器人 的非线性运动带来突破